Abstract
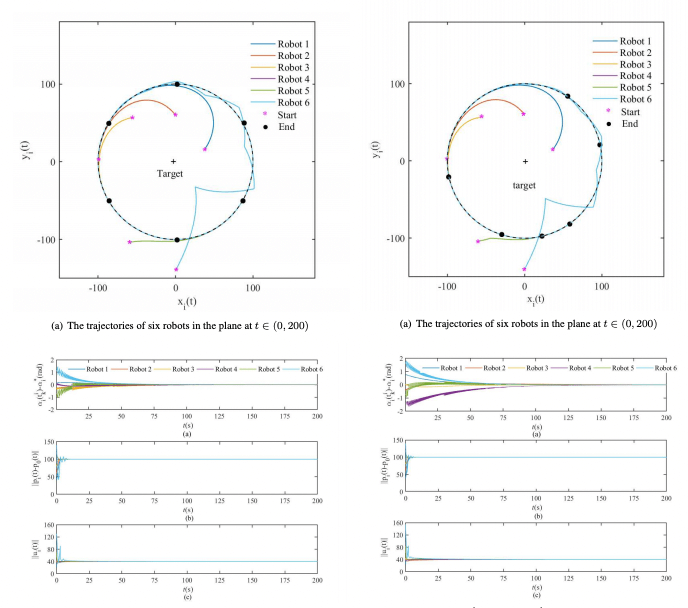
This article investigates circular formation control problems for a group of anonymous mobile robots in the plane, where all robots can converge asymptotically to a predefined circular orbit around a fixed target point without collision, and maintain any desired relative distances from their neighbors. Given the limited resources for communication and computation of robots, a distributed event-triggered method is firstly designed to reduce dependence on resources in multi-robot systems, where the controller's action is determined by whether the norm of the event-trigger function exceeds zero through continuous sampling. And then, to further minimize communications costs, a self-triggered strategy is proposed, which only uses discrete states sampled and sent by neighboring robots at their event instants. Furthermore, for the two proposed control laws, a Lyapunov functional is constructed, which allows sufficient stability conditions to be obtained on the circular formation for multi-robot systems. And at the same time, the controllers are proved to exclude Zeno behavior. At last, numerical simulation of controlling uniform and non-uniform circular formations by two control methods are conducted. Simulation results show that the designed controller can control all mobile robots to form either a uniform circular formation or a non-uniform circular formation while maintaining any desired relative distances between robots and guaranteeing that there is no collision during the whole evolution. One of the essential features of the proposed control methods is that they reduce the update rates of controllers and the communication frequency between robots. And also, the spatial order of robots is also preserved throughout the evaluation of the system without collision.
