国家需求
智能船舶是构建现代化航运体系、保障国家海上运输安全、推动航运业高质量发展的重要抓手。机舱作为船舶的“心脏”,其运行状态直接关系整船的安全与可靠性。围绕机舱安全高效运行需求,亟需突破智能巡检与自主运维等关键技术。
关键问题
针对传统人工间歇巡检效率低、隐性故障监测滞后、固定视觉巡检可接近性差、缺乏多模态融合技术、巡检手段与运维系统融合不足等长期存在的行业痛点问题,提出了面向船舶机电舱室复杂工况的“船舶AI轮机长-智能机舱巡检系统”。
核心技术
突破大模型驱动的跨模态统一语义建模方法,解决机舱多源感知数据难融合与弱关联推理难题;攻克连续视频流多尺度时序语义聚合技术,解决长周期巡检中慢变隐患识别可靠性不足问题;提出具身智能分层嵌套推理框架,破解复杂设备集群协同诊断与自主处置难题。

成果应用
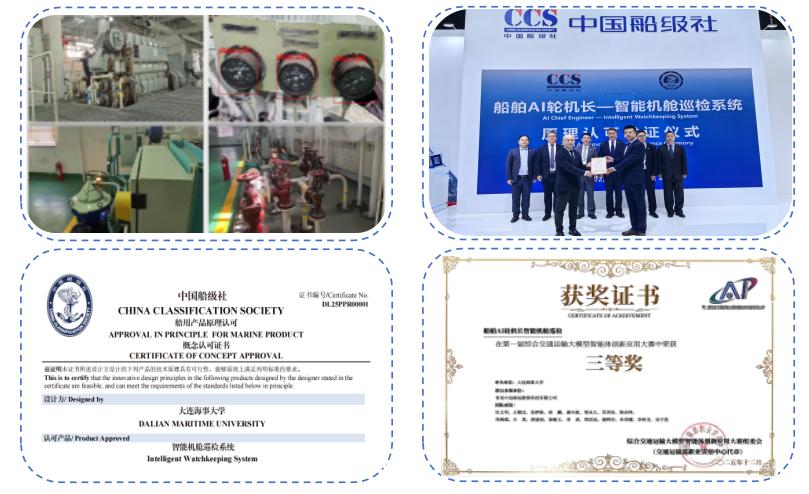
系统已完成核心功能的整体设计、原理验证和实验条件下技术测试,整体成熟度达到关键技术验证阶段。系统已实现巡检路径覆盖与自主巡航,并具备多模态感知、智能仪表识别、大模型辅助决策以及机械臂辅助作业等能力。相关成果已获得中国船级社颁发的原理认可证书,并在综合交通运输大模型智能体创新应用大赛中获得全国三等奖,为后续实船应用和工程推广奠定了基础。