深海洋研41党支部、大连海事大学海洋智能装备党支部 | 深化党建与学科融合,因地制宜发展新质生产力
- 2025年2月23日,清华大学深圳国际研究生院深海洋研41党支部与大连海事大学海洋智能装备党支部开展了一次深入的党支部建设交流活动。此次交流活动的主题为加强党支部建设与学科特色的结合,推动党建引领作用的发挥,并探讨如何调动更多同学的入党积极性。

- 在交流活动中,清华大学深圳国际研究生院的党员们分享了党支部建设的经验与面临的挑战。深海洋研41党支部的何馨怡同志提出,如何将党建工作与海洋学科特色深度融合,是当前党支部亟待解决的重要问题。尽管过去的党组织活动取得了一定成效,但内容相对通用,缺乏与海洋领域的紧密结合。与此同时,党员们也关注到如何提升同学们的入党积极性。作为新时代青年,他们深知,党组织的力量不仅来自党员自身,更需要吸引和凝聚更多优秀同学的参与,以不断壮大组织力量,发挥更大的引领作用。听取对方经验之后,深海洋研41党支部的党员们表示,未来党支部将尝试更多有海洋特色的党员活动,以增强党员们的归属感和使命感。同时通过举办各类活动,增强与同学的交流互动,激发同学们的责任感与使命感,成为提升入党积极性的有效途径之一。

- 在党课上,同学们了解到,新质量生产力不仅关注生产过程中的技术革新,更强调产品质量和生产效率的全面提升。在此过程中,绿色发展理念日益受到重视,企业在追求经济效益的同时,也积极推动环境保护与资源节约。根据《决定》行文思路,将在全面深化改革的道路上,进一步加强创新机制,推进全面改革。在党的二十大精神指引下,同学们要增强战略定力,不断优化政策措施,以高效执行力推动各项改革落地。面对未来,同学们将持续推进以科技创新为核心的高质量发展,借助政策优势和技术突破,推动产业结构优化,提升国家综合竞争力。在全社会的共同努力下,必将迎来更加繁荣与可持续的未来。党课结束后,同学们就如何发展新质生产力问题展开了讨论。沈煦辰同学分享了他对深圳地区的思考:“深圳作为经济特区,其发展新质生产力可从海洋资源合理开发与保护、优化城市空间布局、强化高新技术产业与战略性新兴产业基础、吸引和培养高素质人才、创新体制机制及加强国际合作等方面入手,充分利用其自然与产业优势,打造具有国际竞争力的创新高地。”

- 在本次组织生活会中,清华大学深海洋研41党支部不仅与大连海事大学海洋智能装备党支部深入探讨了党建与学科特色融合的创新路径,也分享了各自的宝贵经验与实践成果。通过多样化的交流方式和主题党课的深入解读,更是激发了各位同学的责任感和入党热情,为今后两支部各自的党建工作注入了新动能。
原文链接:
轮机工程学院海洋智能装备党支部组织开展2024年度组织生活会暨民主评议党员大会
- 为深入学习贯彻党的二十届三中全会精神,推进支部建设取得更扎实的成效,3月5日,轮机工程学院海洋智能装备党支部组织开展2024年度组织生活会暨民主评议党员大会。轮机工程学院副院长田昕出席会议并作点评讲话,会议由海洋智能装备党支部书记徐敏义主持,支部全体党员参加会议。

会前,党支部委员会结合实际制定了详细的会议方案,广泛征求了党员和群众的意见建议,确保会议内容有针对性和实效性,为组织生活会的顺利召开奠定了坚实的基础。
会上,徐敏义首先就党支部成立以来的建设、工作落实情况进行述职,并表示党支部将继续加强党的先进理论在团队方向引领上的重要作用,推动党建与团队发展的多维度有机融合,深入海洋智能化产业一线,牢牢把握时代脉搏,紧跟技术发展的步伐,确保党建工作与科研创新同步高质量推进。着眼未来,党支部将结合海洋智能化装备产业的特点,积极探索党建与业务发展的新模式、新路径,努力打造一支技术过硬、思想先进、作风务实的团队。
随后,党支部成员逐一开展了个人检视剖析,深刻查摆了自身存在的问题,并提出了努力方向和具体整改措施。在相互批评环节,支部成员本着实事求是、坦诚相待的原则,积极提出批评意见,指出各自工作中的不足与改进空间。
会议最后,田昕对支部建设情况和会议环节进行总结点评。她强调,党支部应注重时刻检视与反思,明确支部在党建工作与科学研究中的责任与使命;要深入推动理论与实践相结合,确保党的理论方针政策落地生根。她强调,评议环节对支部发展具有重要指向作用,支部应结合评议情况和具体工作实际加强问题整改,确保整改取得真正成效。
此次会议为党支部建设与发展指明了方向,强化了团队合作与建设意识,激励了支部全体党员在各自岗位上更好发挥作用。
原文链接:
团队徐敏义教授担任海洋智能装备党支部党支部书记
- 在2024年12月的支部换届改选中,经学院党委批准,轮机工程学院成立了两个以科研团队为基础的党支部,分别为以李文华教授担任党支部书记的海底工程技术与装备国际联合研究中心党支部和以徐敏义教授担任党支部书记的海洋智能装备党支部。

- 将“支部建在科研团队上”是轮机工程学院党委推进党建与业务“一融双高”的重要方式之一。通过团队式支部,选拔科研教学能力强、思想道德素质高的优秀骨干教师担任支部书记,通过强化党支部的政治功能和组织功能,推动支部成员在人才培养、科研创新、产教融合等方面协同发展。今后,轮机工程学院党委也将积极探索支部建设的多样形式,不断激活支部的内生动力,提高支部的凝聚力,发挥好支部的战斗堡垒作用。
原文链接:



团队姜兴家老师荣获2023~2024学年大连海事大学优秀教学奖获奖一等奖
- 关于2023~2024学年大连海事大学优秀教学奖获奖人员名单公示的通知 发布人:[李霏] 发布部门:[教务处] 发布时间:2024-12-20 09:02 点击次数:1207 各有关单位: 根据《大连海事大学教学荣誉称号评选办法》(连海大办字〔2020〕10号)文件要求,经个人申请、单位推荐、单位公示、学校形式审查、学校优秀教学奖评审小组评审、学校教学荣誉称号评选领导小组审定,确定2023~2024学年大连海事大学优秀教学奖获奖人员 37名,现将结果公示如下: 一等奖(15人,按姓氏笔画排序) 于 彦 王志平 宁 博 曲衍鹏 刘丙新 孙晨阳 沈寿程 杭晓明 周怡然 姜兴家 姚 征 高晓露 郭起飞 程 鲲 蹇令香 二等奖(22人,按姓氏笔画排序) 于洋(20121052) 于家根 马梦知 王轶卓 王 勇 田 昊 巩 宁 那振宇 李 娜 肖方兵 肖 秀 张金男 陈 飞 陈国艳 林 帜 赵 凯 郝胜宇 洪 刚 曹玉墀 梁大龙 韩美玲 谭小芳 公示期限:12月20日至23日。
大连海事大学Nano Energy综述!探索运动能量采集的混合动力:电磁发电与摩擦电纳米发电的协同效应
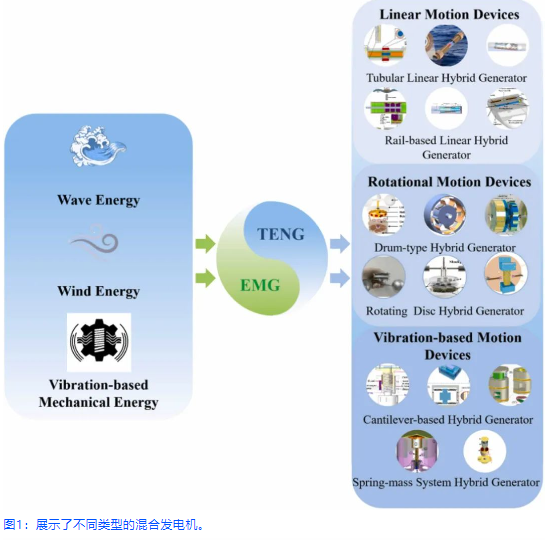
- 随着全球对可持续和可再生能源解决方案的需求日益增长,电磁发电(EMG)和摩擦电纳米发电(TENG)技术因其将机械能转换为电能的创新方法而备受关注。EMG基于电磁感应原理,利用导体在磁场中的运动产生电流,而TENG则基于接触起电和静电感应,通过材料接触和分离时的电荷交换来收集能量。这两种技术在能量采集领域展现出了巨大的潜力,尤其是在捕获环境中的机械能量方面。然而,单一技术往往难以适应多变的能量环境,因此,将EMG和TENG技术集成到混合系统中,可以充分发挥两者的优势,提高能量采集的效率和范围。
- 在这篇综述中,研究人员深入探讨了基于运动类型的电磁发电(EMG)和摩擦电纳米发电(TENG)技术的集成,重点分析了线性、旋转和基于振动的运动类型。他们发现,线性运动设备在捕获可预测的能量源(如海浪)方面特别有效,适用于海洋应用。而旋转运动设备在连续高速运动环境中表现出色,尤其是在风力发电系统中。相比之下,基于振动的设备能够捕获不规则和低频运动中的能量,为车辆和可穿戴电子设备提供了多功能性。研究还讨论了混合系统的最新进展,展示了材料和设计的进步,这些进步增强了能量采集和效率,同时也指出了包括机械磨损、环境影响和精确对准需求在内的挑战。
- 这项研究强调了理解EMG和TENG技术在混合系统中的互补性质的重要性,指出它们的集成可以解决各自的局限性。EMG在捕获高速、连续运动方面表现出色,而TENG在低频和不规则运动中更为有效,使得混合系统能够在多样化的环境中高效地采集能量。研究结果表明,战略性地集成EMG和TENG技术可以显著推进可持续能源解决方案,并促进能量采集领域的创新发展。通过深入分析这些元素,本文旨在阐明当前的技术和未来的趋势,提供宝贵的见解,以满足全球对可再生能源日益增长的需求。随着世界趋向更可持续的能源解决方案,理解和推进这些技术将是充分利用可用的机械能量进行电力发电的关键。
- 文献:https://doi.org/10.1016/j.nanoen.2024.110584
原文链接:
大连海事大学杜太利、徐敏义团队在AI赋能的轴承磨损诊断及数字孪生应用领域取得重要进展Nano Energy
- 随着人工智能(AI)和数字化时代的到来,开发能够自我监测和智能诊断的轴承成为了一个富有意义但充满挑战的课题。轴承作为旋转机械中的关键支撑部件,在几乎所有的关键行业和日常应用中扮演着不可替代的角色,例如轮式车辆、风力涡轮机、航空发动机等。轴承的数字化双胞胎(Digital Twin)在物联网(IoTs)、大数据信息处理和AI建模分析的结合下,能够实现当前状态评估、过去问题的诊断以及未来发展的预测,并提供实时分析结果、模拟各种可能性以及提供全面的决策支持。然而,传统的传感技术在现代高度集成的机械中面临着传感器布置的挑战,而基于摩擦电纳米发电机(TENG)的传感器与轴承更为兼容,因为轴承内部容易找到两个具有往复运动的摩擦表面,无需外部侵入。因此,利用TENG实现自供电或自感测的摩擦电轴承已被频繁报道。在这项研究中,研究人员探索了一种AI赋能的轴承结构滚动摩擦电纳米发电机(B-TENG),旨在实现轴承磨损的条件监测和故障诊断。
- 在这项研究中,研究人员开发了一种AI赋能的轴承结构滚动摩擦电纳米发电机(B-TENG),用于轴承磨损的自我感知、智能诊断,并展示了其在数字孪生应用中的潜力。B-TENG直接利用轴承结构来检测和诊断滚动球的磨损,其中球体作为自驱动传感器自由移动。研究人员首次通过季节性和趋势分解使用Loess(STL)方法和卷积神经网络(CNN)分析摩擦电电流波形,揭示了磨损故障与波形特征之间的映射机制。然后,开发了基于CNN的深度学习模型,通过训练和测试具有不同磨损类型、程度和位置的B-TENG样本数据。通过STL提取磨损故障的特征后,故障类型的预测准确率达到了98.40%,远远优于使用原始电流信号时的最高准确率69.60%。此外,研究人员首次实现了与轴承健康甚至寿命相关的滚动球磨损程度的检测。对于磨损程度为1%至5%的微小缺陷,识别准确率可达96%,为监测轴承早期故障和故障演变提供了重要机会。接下来,还模拟了轴承的单侧和双侧磨损,显示出在识别不同位置分布的磨损球方面具有95.20%的高准确率。最后,建立了轴承健康监测演示系统,实时诊断轴承球的磨损状态,并在专业模型仿真中创建上述结果的副本数字信息。总的来说,结合AI算法的提出的系统在数字孪生应用方面展示了巨大的潜力,例如智能机械设备的条件评估、故障诊断和趋势预测。
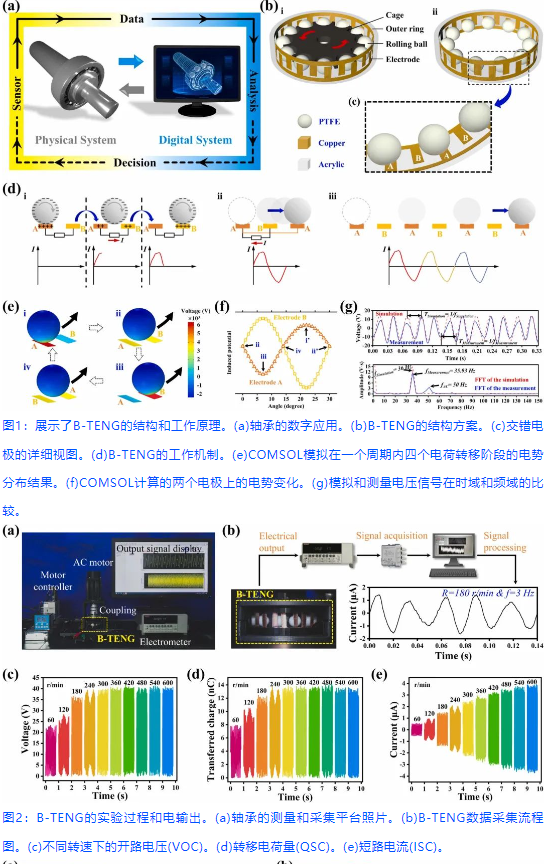
研究人员开发的AI赋能的滚动TENG为智能轴承的自我感知和智能诊断提供了一种新的方法。B-TENG直接从实际轴承结构中衍生出来,其中由笼架驱动的滚动PTFE球作为可移动的自由层参与与交错铜电极的摩擦电化。在轴承球磨损故障诊断的研究中,引入了STL分解算法来提取难以区分的电流信号中的故障特征。然后,通过训练CNN模型,实现了对滚动球上不同磨损类型、程度和位置的高准确度识别,准确度在95.20%至98.40%之间。特别是,对于模拟早期故障的微小缺陷,其磨损率在1%至5%之间,显示出有效的检测能力。最后,展示了一个面向数字孪生应用的轴承健康监测系统,该系统能够实时诊断轴承球的磨损状态,从而在专业模型仿真软件中调用轴承数字孪生体。总的来说,摩擦电效应与AI算法的结合在智能机械的故障诊断领域显示出强大的潜力。所提出的数字孪生系统能够通过基于TENG的测量、AI辅助分析和模型映射仿真,实时感知、准确诊断并主动反映物理对象的状态,为将摩擦电传感技术应用于数字孪生领域开辟了新的探索路径。
原文链接:
团队成员荣获招商局C ME FLY“海辽”杯未来航运青年创想大赛2024总决赛全国银奖
- 12月9日,招商局C ME FLY“海辽”杯未来航运青年创想大赛2024总决赛在深圳举行。本次大赛由招商局慈善基金会支持,招商轮船主办,中国大学生知行促进计划、中国交通报社、航运界协办。招商轮船监事会主席孙湘一出席并致辞,深圳海事局纪检组组长吴江涛、招商局发展研究中心副主任曲保智、招商港口副总经理李文波、招商工业副总经理梅先志、招商轮船副总经理黄茂生等到场并为获奖队伍颁奖。
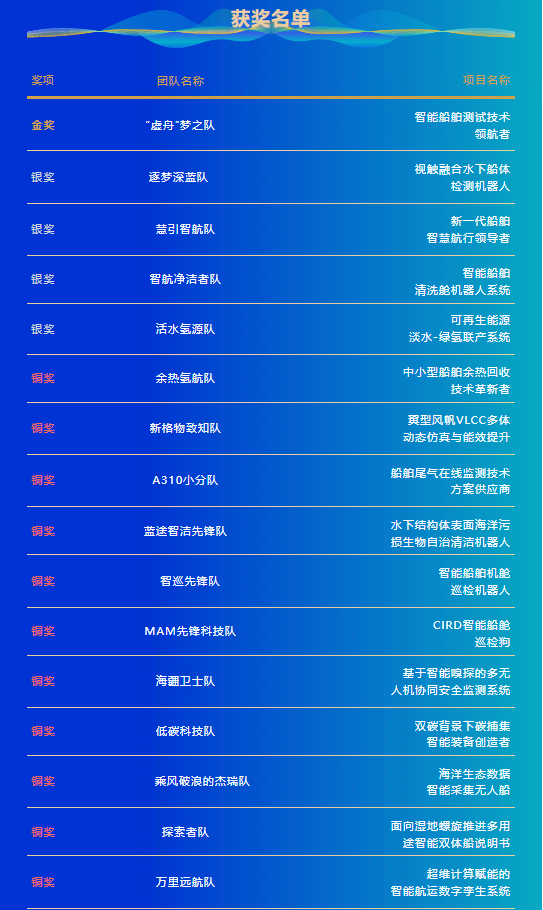
- 大连海事大学逐梦深蓝队奔赴深圳参赛,携带项目“视触融合水下船体检测机器人”应对船舶行业新形势和新需求,融合了先进的水下视觉传感器和触觉传感器技术,实现对船舶需检测部位快速定位。视觉传感器实现对船体附着物的迅速捕捉和定位;触觉传感器模确保机器人在黑暗、浑浊的水下环境中正常作业。感知维修目标产生的波动流场的仿生胡须传感器,实现对目标的追踪;装备于水下作业机械爪上的掌心传感器,实现高效的水下打捞作业。本项目的机器人专为商业和消费市场设计,提供了一种安全、高效且便携的船体维修方案。



原文链接:
- Sponsors
- Privacy
- Join us
- Contact
- © 2021 MSPSLab [CC BY-NC-ND 4.0]
-
