Abstract
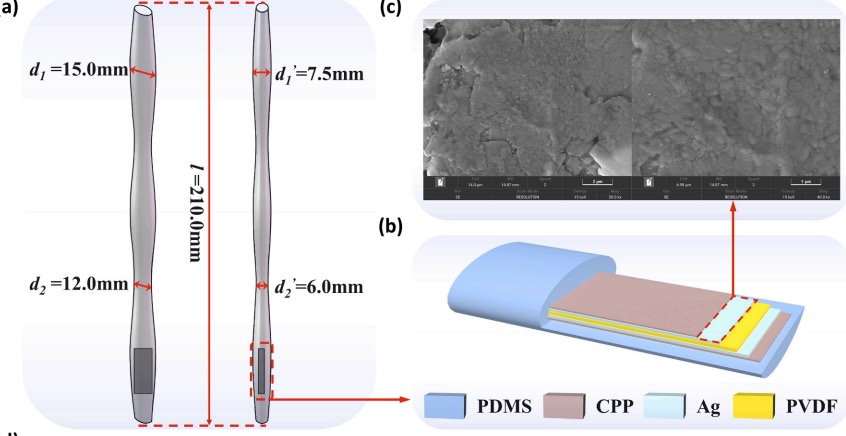
Underwater flow field perception is a crucial technique for obtaining the motion status and trajectory of targets. To perceive the vortex in the flow field environment and obtain the disturbance information of the vortex, we propose a piezoelectric wavy whisker sensor (PWWS) inspired by the mechanism of a seal's whisker to perceive and track prey effectively. The PWWS is designed to imitate the unique biological structure of seal whiskers and incorporates the principles of piezoelectric nanogenerators. Specifically, it consists of a waterproof main body made of polydimethylsiloxane (PDMS), and a piezoelectric perceiving unit made of polyvinylidene difluoride (PVDF) encapsulated at the bottom. In the present study, the vortex is generated through a cylinder bluff body. The relationship between the signal of PWWS (peak voltage and frequency) and perception parameters (diameter of the bluff body, distance between the PWWS and the bluff body, impact angle, and flow velocity) are systematically investigated. Then, a mathematical model between vortex parameters and the signal frequency of the PWWS is proposed, and an APP with real-time perception is realized using MATLAB. Through validation by the experimental data, the APP exhibits reasonable predicted results and can well precept the above perception parameters (the error lower than 10%). Therefore, the PWWS has great potential to obtain the motion status and trajectory of underwater targets.
