Abstract
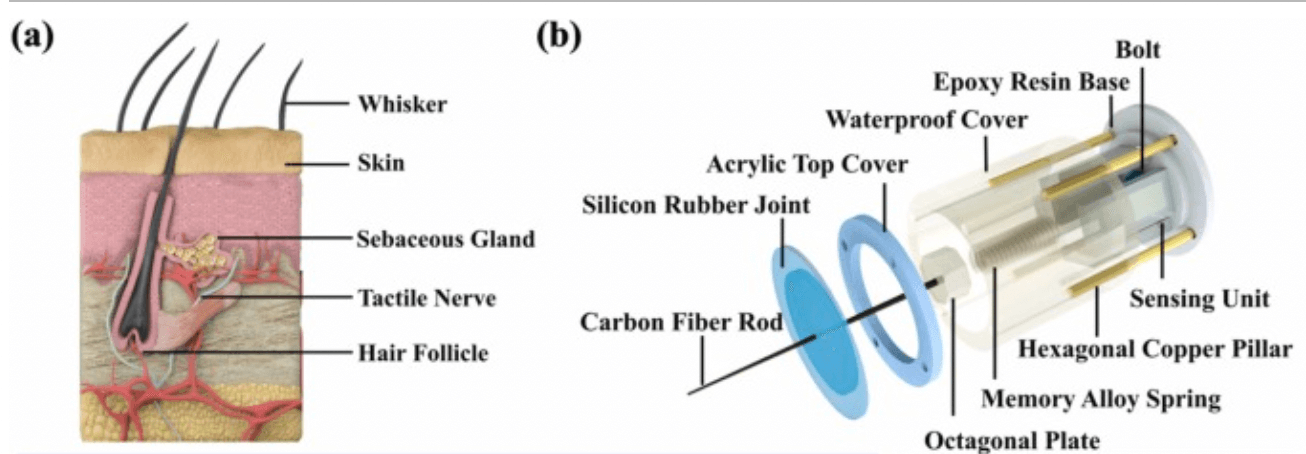
As key devices for underwater robot to perceive underwater environments, tactile sensors play an important role in seabed exploration. Inspired by the structure of marine mammal whiskers, we designed a bio-inspired whisker sensor (BWS) based on triboelectric nanogenerators to assist underwater robots in sensing underwater environments. The proposed device generated electrical signals through triboelectric and electrostatic induction between a fluorinated ethylene propylene film and ink. With the assistance of a structural design inspired by biology, the artificial BWS could estimate the external stimulation area. We demonstrated specific functions of the sensor, such as LED lights control and real-time external load monitoring to demonstrate its utility. Moreover, the BWS installed in underwater robots identify the direction, position, and frequency of external loads by extracting the characteristics of electrical signals, particularly in cases when optical and acoustic devices cannot be used, such as in turbid water. The results showed that the BWS can serve as an underwater whisker sensor for underwater robots for perceiving underwater environment and avoiding reactive obstacles.
