Abstract
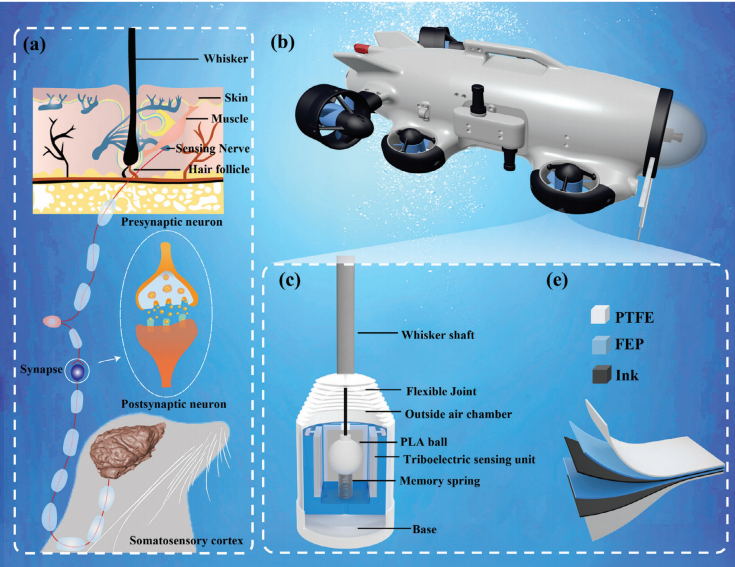
Aquatic animals can perceive their surrounding flow fields through highly evolved sensory systems. For instance, a seal whisker array understands the hydrodynamic field that allows seals to forage and navigate in dark environments. In this work, a deep learning-assisted underwater triboelectric whisker sensor array (TWSA) is designed for the 3D motion estimation and near-field perception of unmanned underwater vehicles. Each sensor comprises a high aspect ratio elliptical whisker shaft, four sensing units at the root of the elliptical whisker shaft, and a flexible corrugated joint simulating the skin on the cheek surface of aquatic animals. The TWSA effectively identifies flow velocity and direction in the 3D underwater environments and exhibits a rapid response time of 19 ms, a high sensitivity of 0.2V/ms-1, and a signal-to-noise ratio of 58 dB. The device also locks onto the frequency of the upstream wake vortex, achieving a minimal detection accuracy of 81.2%. Moreover, when integrated with an unmanned underwater vehicle, the TWSA can estimate 3D trajectories assisted by a trained deep learning model, with a root mean square error of approximate to 0.02. Thus, the TWSA-based assisted perception holds immense potential for enhancing unmanned underwater vehicle near-field perception and navigation capabilities across a wide range of applications.
This work introduces a deep learning-assisted triboelectric whisker sensor array (TWSA) for 3D motion estimation and near-field perception in unmanned underwater vehicles. The TWSA detects flow velocity and direction. It achieves 81.2% accuracy in wake vortex detection and enables precise 3D trajectory estimation with a root mean square error of 0.02, significantly enhancing underwater vehicle navigation capabilities. image
