Abstract
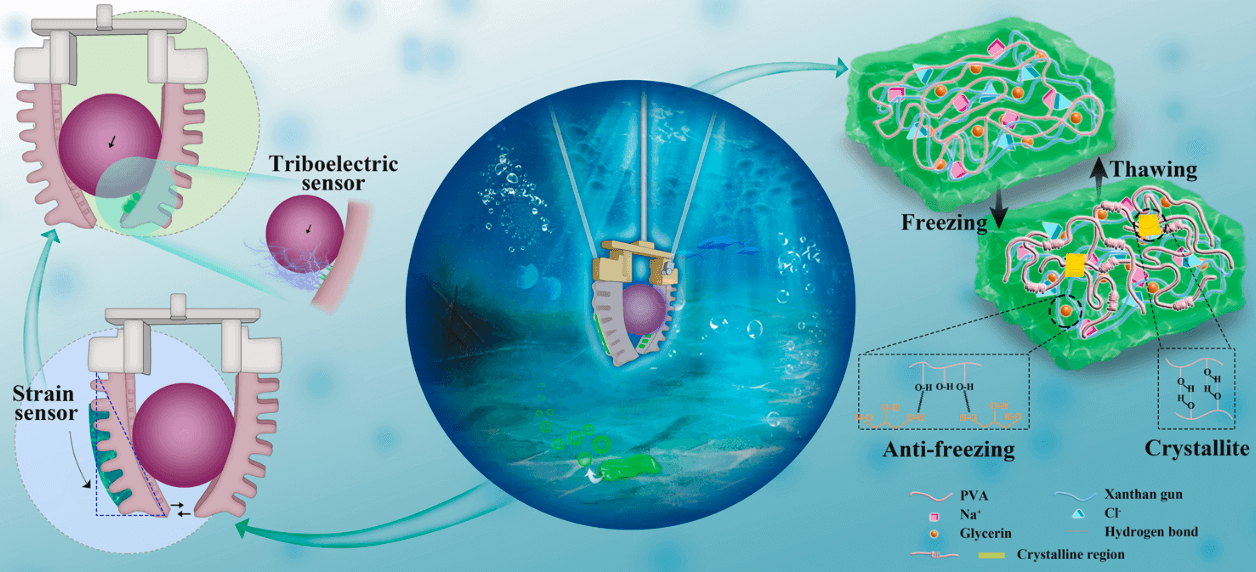
Hydrogel-based wearable devices and soft robotics have become a research hotspot. However, due to hydrogels’ poor anti-dehydration and susceptibility to breakage, issues of recycling and waste stream contamination risks have severely limited large-scale applications. Moreover, the practical monitoring of robotic grasping is rather limited due to the complex underwater environment. In this work, an environment-friendly high-performance ionic hydrogel with fracture toughness (146.5 kJ/m3) capable of strain and triboelectric sensing is developed. As a strain sensor, it owns good sensitivity (gauge factor: 4.30), a quick response time (70 ms), outstanding stability (~ 1000 cycles), low-temperature resistance, and well reproducibility (within one month). The hydrogel was also employed in the development of a flexible triboelectric sensor (200 % strain), which could respond sensitively to abundant types of materials (including water droplets). Due to these advantageous properties, the developed strain-triboelectric sensors can detect real-time human motion and grasping states of the soft gripper simulta- neously. Thanks to the good degradability (~ 12 h), it may well address potential problems of high cost and risks during the underwater recycling process. To summarize, the developed all-in-one strain-triboelectric sensors have demonstrated great potentials in enhancing the actively perceiving capabilities during underwater soft robotic grasping.
