研究背景
- 水下机器人通常被配备多种传感器执行水下任务以协助人类提高海洋生态系统的探索效率。当水下机器人在水质较差的环境中作业时,难以准确获得周围环境信息,导致其工作效率显著降低。然而,海洋动物依靠它们的感知器官能够在黑暗和浑浊的水下环境中识别周围环境。作为具有代表性的海洋哺乳动物,海獭凭借灵敏的胡须能够轻松地实现游动和捕猎等。摩擦纳米发电机 (TENG) 作为新兴的机电转换技术,因其低功耗和自供能等特点而备受关注。基于TENG工作原理的智能传感器已被制造并用于海事领域的信息监测,水下触须传感器可以为水下机器人收集周围环境的信息提供支持。因此,将TENG原理与海獭触须的仿生结构相结合,可以开发出一种高灵敏度的触须传感器。基于此,提出一种受触须启发用于水下障碍物检测和避让的自供能摩擦电传感器。
文章概述
- 近日,大连海事大学徐敏义教授团队与北京大学谢广明教授团队展开合作,提出一种受触须启发用于水下障碍物检测和避让的自供能摩擦电传感器(BWS),以协助水下机器人感知水下环境。BWS主要包括环氧树脂基底、触须杆、防水罩,硅胶关节和摩擦电传感单元等结构。通过传感单元的氟化乙烯丙烯薄膜和油墨之间的接触分离产生电信号获取外部负载的信息。文中演示了传感器的实际功能,例如 LED灯控制和外部负实时载监控以展示其实用性。安装在水下机器人上的 BWS通过提取电信号的特征来识别外部负载的方向、位置和频率,尤其是在无法使用光学和声学设备的情况下。结果表明,BWS可以作为水下机器人的水下触觉传感器,用于水下障碍物检测和避让。相关工作以“Whisker-inspired and self-powered triboelectric sensor for underwater obstacle detection and collision avoidance”为题,发表在Nano Energy上。大连海事大学轮机工程学院研究生刘建华、徐鹏、郑嘉熙为论文共同第一作者。北京大学谢广明教授与大连海事大学徐敏义教授为论文共同通讯作者。
图文导读
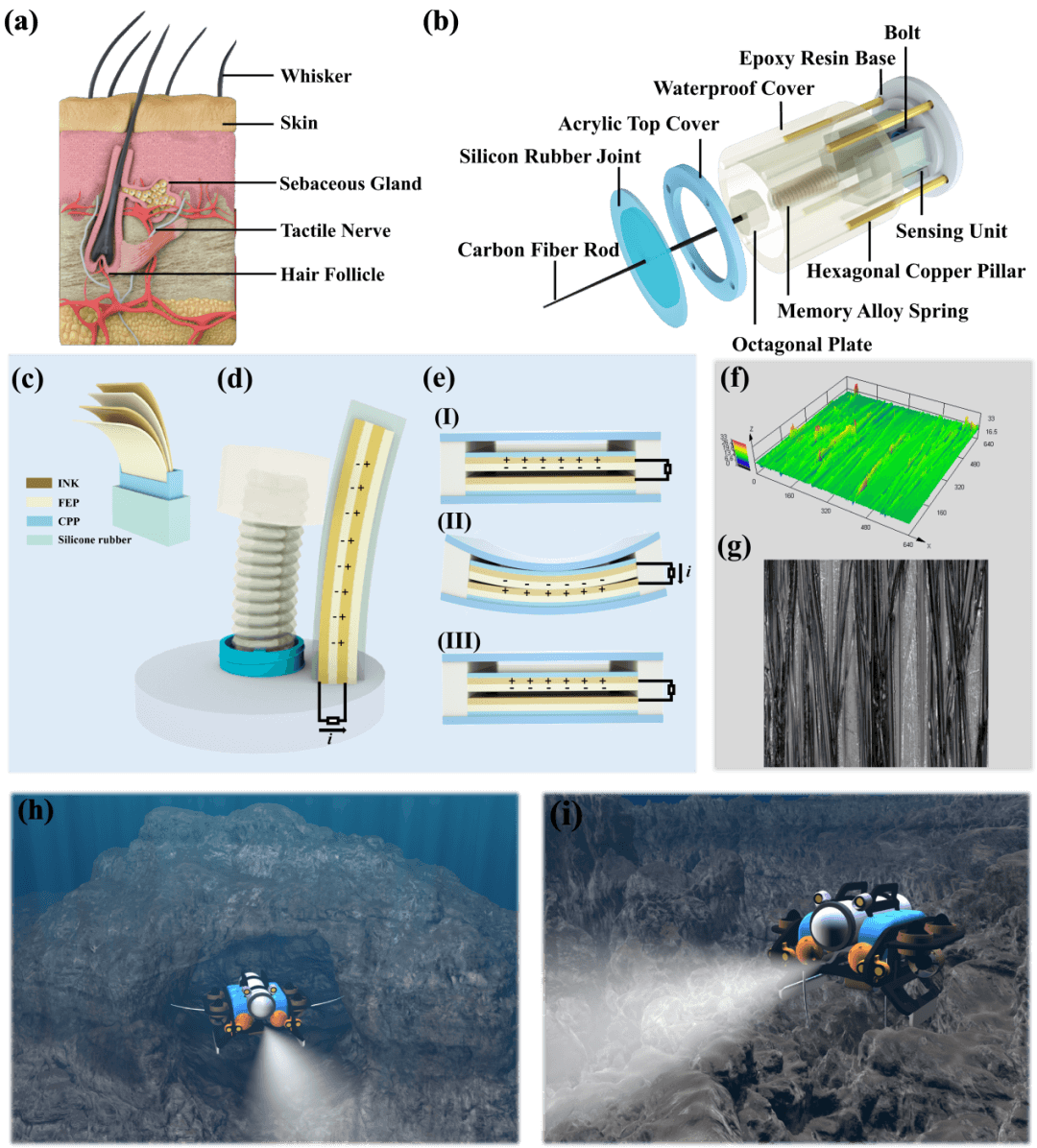 图1 BWS结构、工作机理及应用
(a)触须结构图;(b)BWS的结构图;(c)传感单元的结构图;(d)-(e)导电油墨和FEP接触分离过程中的电荷分布;(f)FEP表面粗糙度;(g)FEP表面电镜扫描图像;(h)-(i)BWS在水下障碍物检测及避让的应用。
图1 BWS结构、工作机理及应用
(a)触须结构图;(b)BWS的结构图;(c)传感单元的结构图;(d)-(e)导电油墨和FEP接触分离过程中的电荷分布;(f)FEP表面粗糙度;(g)FEP表面电镜扫描图像;(h)-(i)BWS在水下障碍物检测及避让的应用。
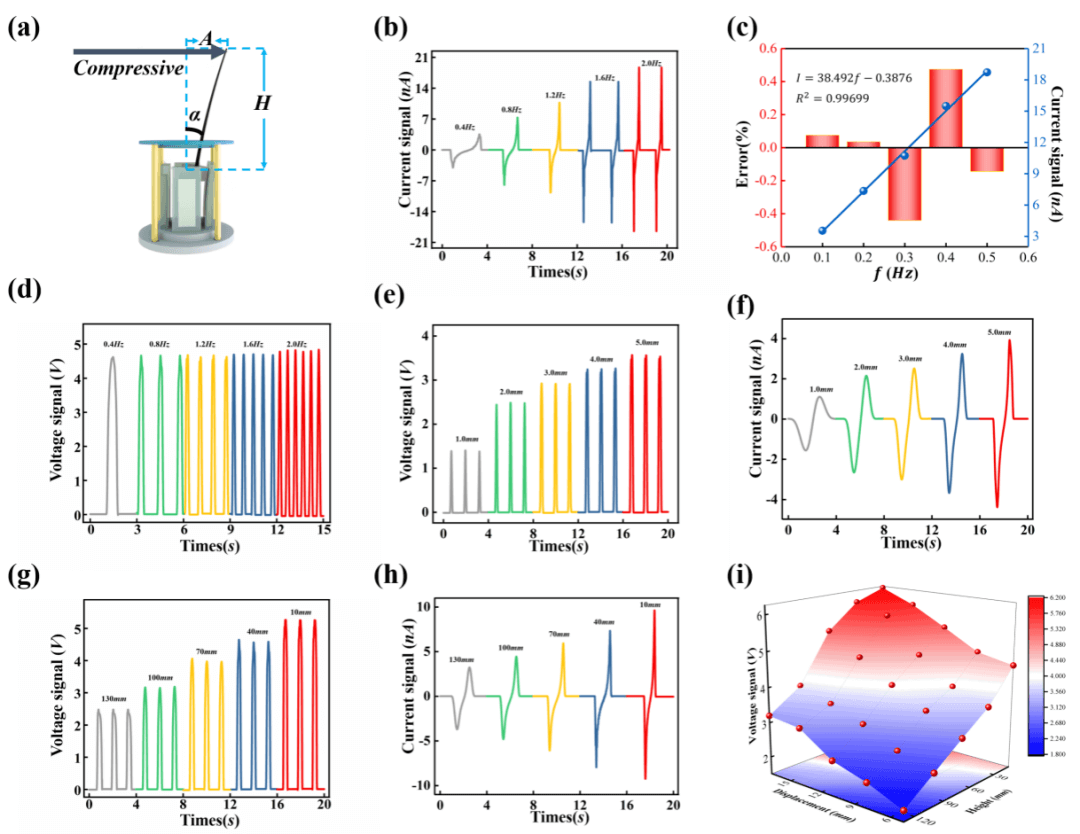 图2 BWS在不同负载参数下的性能。
(a)传感器在外部负载下的状态;(b)从0.4 至 2.0 Hz负载频率的短路电流;(c)短路电流与负载频率之间的拟合线性关系;(d)从0.4 至 2.0 Hz负载频率的开路电压;(e)从1.0 至 5.0 mm负载位移的开路电压;(f)从1.0 至 5.0 mm负载位移的短路电流;(g)从130 至10 mm负载高度的开路电压;(h)从130至10mm负载高度的短路电流;(i)负载位移和高度对开路电压的影响。
图2 BWS在不同负载参数下的性能。
(a)传感器在外部负载下的状态;(b)从0.4 至 2.0 Hz负载频率的短路电流;(c)短路电流与负载频率之间的拟合线性关系;(d)从0.4 至 2.0 Hz负载频率的开路电压;(e)从1.0 至 5.0 mm负载位移的开路电压;(f)从1.0 至 5.0 mm负载位移的短路电流;(g)从130 至10 mm负载高度的开路电压;(h)从130至10mm负载高度的短路电流;(i)负载位移和高度对开路电压的影响。
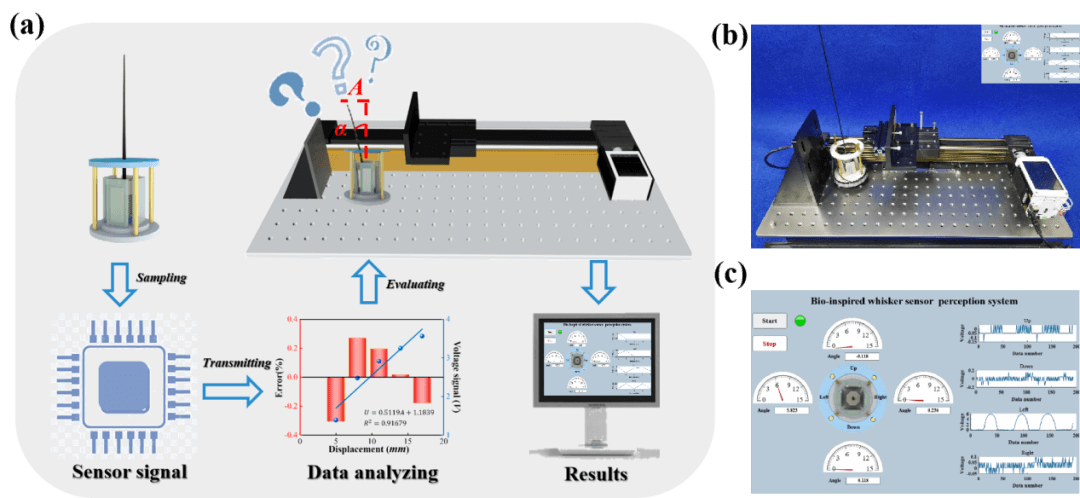 图3 BWS用于外部负载监控。
(a)BWS用于负载位移监测的逻辑框图;(b)实验装置示意图;
(c)数据可视化界面。
图3 BWS用于外部负载监控。
(a)BWS用于负载位移监测的逻辑框图;(b)实验装置示意图;
(c)数据可视化界面。
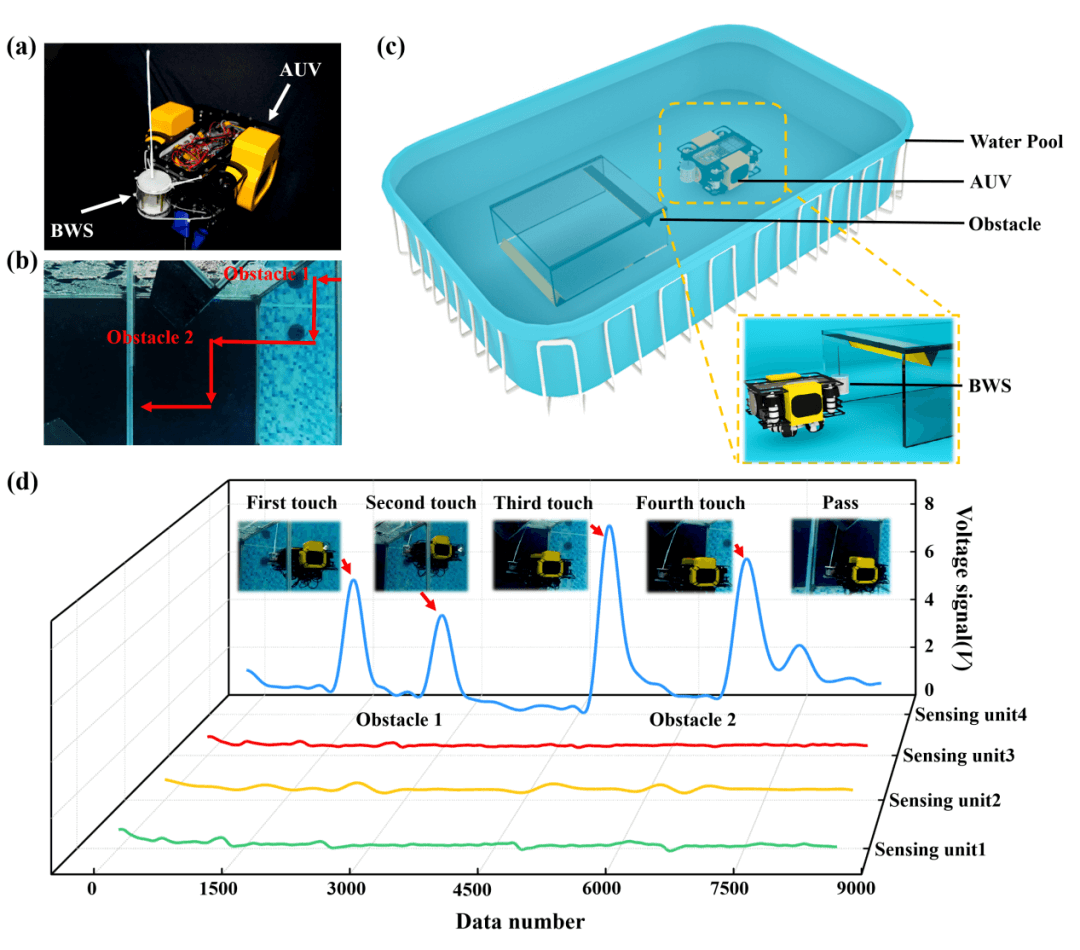 图4 将BWS安装于水下机器人实验。
(a)-(c)使用BWS进行反应性避障的传感器安装图和场景布局图。
(d)BWS用于水下避障的输出信号图。
图4 将BWS安装于水下机器人实验。
(a)-(c)使用BWS进行反应性避障的传感器安装图和场景布局图。
(d)BWS用于水下避障的输出信号图。
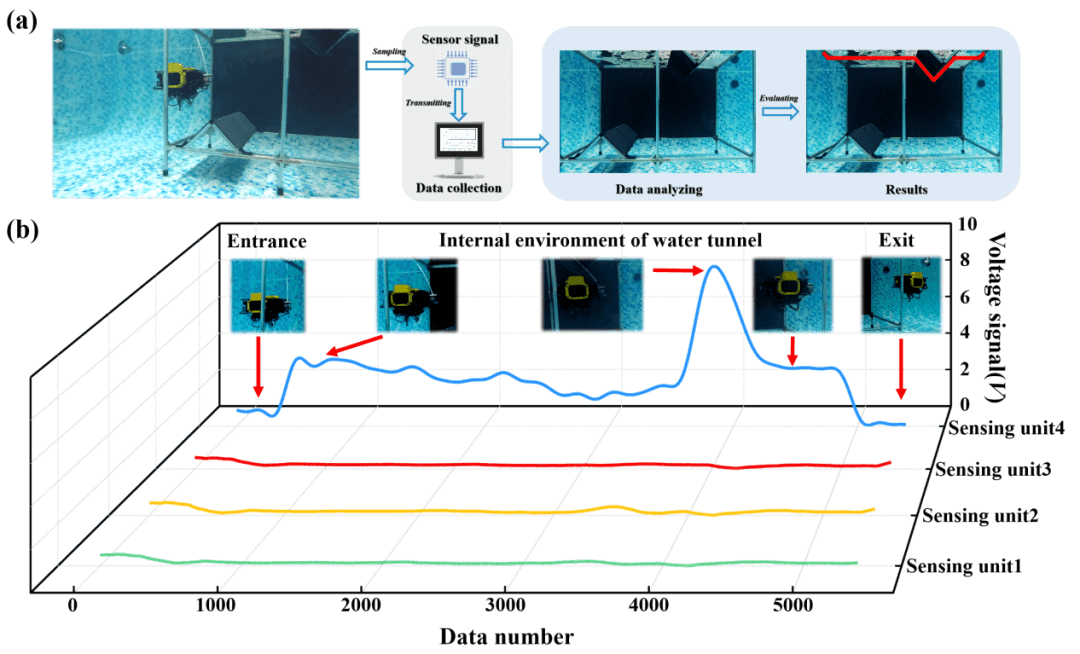 图5 将BWS安装于水下机器人实验。
(a)BWS用于水下环境检测流程图;(b)BWS在水下环境探测中的输出信号图。
图5 将BWS安装于水下机器人实验。
(a)BWS用于水下环境检测流程图;(b)BWS在水下环境探测中的输出信号图。
总结
- 综上所述,本文受触须启发设计了一种用于水下障碍物检测和避让的自供能摩擦电传感器,并将其用作水下机器人的水下传感系统。传感单元中的介电材料通过接触分离产生电信号。通过拟合其与电信号之间的线性关系,分析了外部负载的高度、位移和频率。具有棘突结构的传感单元和刚度系数较小的弹簧可以提高BWS的感知灵敏度。BWS用于控制发光二极管在不同方向的开/关状态,并使用MATLAB可视化界面实时显示BWS产生的电信号。随后,将BWS搭载于水下机器人上用于检测水下隧道表面状况并自主避开障碍物展示了其丰富的水下应用领域。
阅读直达链接:
