背景介绍
- 自主水下航行器 (AUV) 因其在水下的出色适用性而被使用,并且已经开发出不同的传感器设计来帮助 AUV 完成特定任务。尽管AUV可以完成众多任务,但它们仍然不是海洋领域日常工作中不可或缺的一部分。原因是缺乏具有与海洋动物相当的触觉感知能力。具有触觉感受器的海洋哺乳动物可以感知来自生物体运动的复杂刺激,当视觉信息减少或缺失时,海獭通过灵敏的爪子依然能够感知周围环境。这些动物行为学的发展可能为水下触觉传感器的结构设计提供方案。迄今为止,摩擦纳米发电机 (TENG) 还没有用于设计类似手掌的传感器来收集有关水下物体的物理信息。值得注意的是,基于TENG的传感器与触觉感受器类似,因为通常用于摩擦电传感器的软材料的杨氏模量与海洋哺乳动物手掌的杨氏模量处于同一水平。基于此,提出一款摩擦电手掌状触觉传感器可以为水下航行器提供收集有关物理对象信息的能力提供一种简单的方案。
文章概述
- 近日,大连海事大学徐敏义教授团队,北京大学谢广明教授团队和南开大学陶金副教授展开合作提出一款摩擦电手掌状触觉传感器 (TPTS),用于构建水下机器人的触觉感知系统。它是由一种模拟海獭手掌中革质、颗粒状纹理的三维结构实现的,其内部神经结构会提供了额外的线索,表明触觉信息的重要性。此外,沿传感单元表面排列的棘突结构增加了灵敏度(0.125 V/N)。它由感应外部刺激的摩擦电传感器单元、柔性支架、固定框架、密封使用的上舱口盖和柔性盖组成。在手掌结构和摩擦电纳米发电机技术的帮助下,所提出的 TPTS 能够实时检测和区分正常和剪切外部载荷并逼近外部刺激区域,特别是不受触摸频率的影响,即它可以在高频接触下保持稳定的性能。为了突出该设备的适用性和可扩展性,展示了 TPTS 的不同功能,包括控制 LED 灯、检测样品硬度和进行无损管道评估。结果表明,TPTS可以集成到安装在水下航行器上的抓手中,以完成众多水下任务。该成果以题为“A bio-inspired and self-powered triboelectric tactile sensor for underwater vehicle perception”发表于NPJ Flexible Electronics。
图文导读
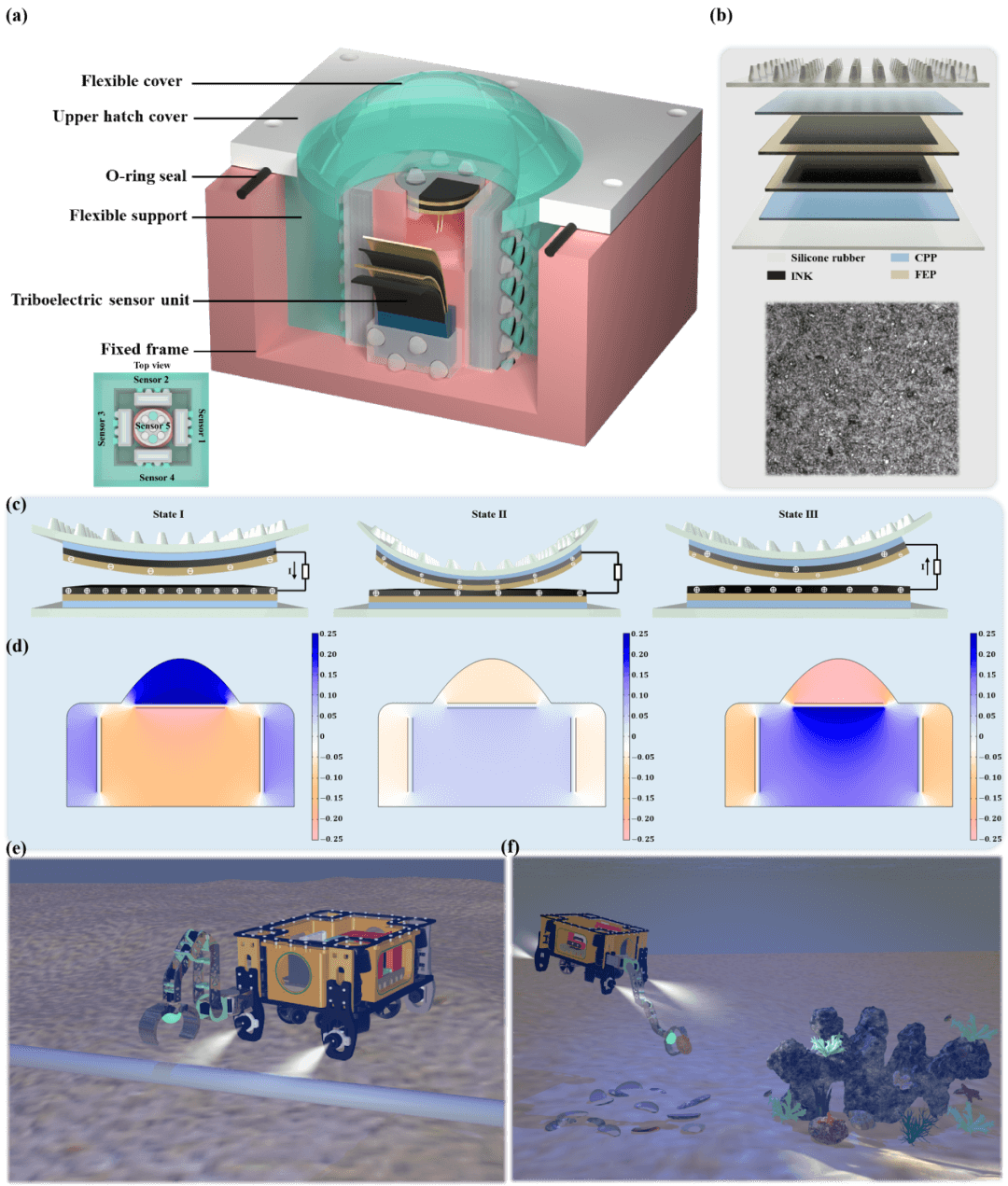 图1 TPTS结构、工作机理及应用。(a) TPTS的结构图。插图:传感器单元布局的俯视图。(b) 传感单元的结构图和FEP膜表面的SEM图像。(c) FEP膜与导电油墨接触分离过程中的电荷分布。(d) COMSOL软件模拟电位分布。(e) TPTS在管道无损检测中的应用。 (f) TPTS在水下自主目标抓取中的应用。
图1 TPTS结构、工作机理及应用。(a) TPTS的结构图。插图:传感器单元布局的俯视图。(b) 传感单元的结构图和FEP膜表面的SEM图像。(c) FEP膜与导电油墨接触分离过程中的电荷分布。(d) COMSOL软件模拟电位分布。(e) TPTS在管道无损检测中的应用。 (f) TPTS在水下自主目标抓取中的应用。
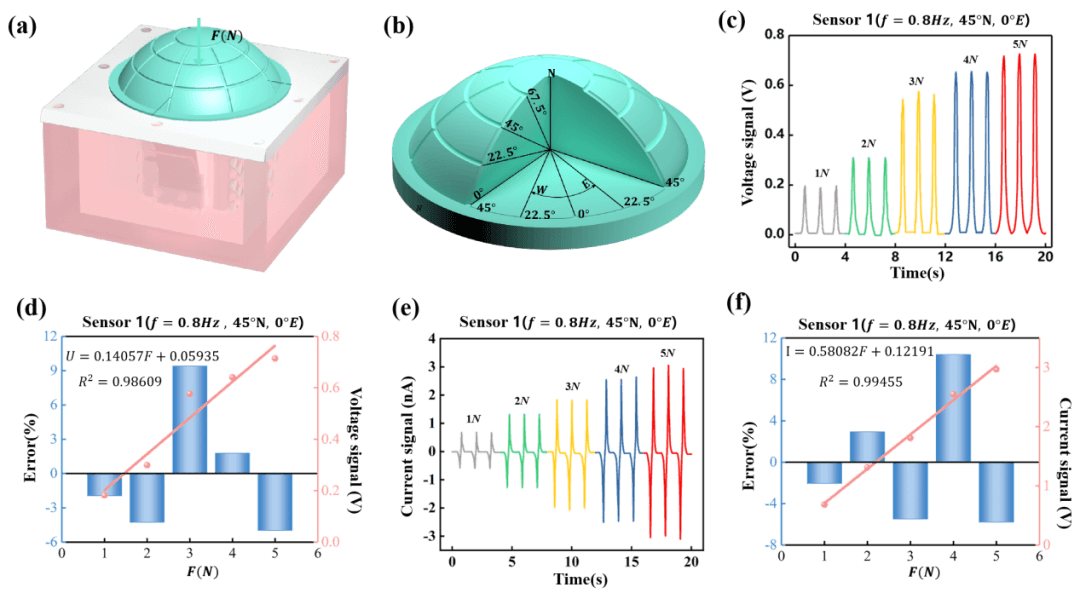 图2 传感器特性研究。(a)传感器单元在外部载荷下的变形图。(b)使用经度和纬度线在柔性盖表面上标注。(c)从1 N到5 N的响应外部负载的开路电压。(d)开路电压与外部负载大小的拟合线性关系。(e)从1 N到5 N响应外部负载的短路电流。(f)短路电流与外部负载大小的线性关系拟合。
图2 传感器特性研究。(a)传感器单元在外部载荷下的变形图。(b)使用经度和纬度线在柔性盖表面上标注。(c)从1 N到5 N的响应外部负载的开路电压。(d)开路电压与外部负载大小的拟合线性关系。(e)从1 N到5 N响应外部负载的短路电流。(f)短路电流与外部负载大小的线性关系拟合。
受海獭手掌的革质颗粒状纹理的启发,TPTS 专为水下航行器的触觉感知系统而设计。TPTS 的功能是通过物理接触来捕捉水下目标的信息。图1 显示了基于 TENG 的触觉传感器的结构图。该结构由带棘突结构的摩擦电传感单元、柔性支架、固定框架、上舱口盖、弹性 O 型圈密封件和柔性盖组成。具体来说,柔性盖和支架(长 60 毫米、宽 32 毫米和高 35 毫米)由硅橡胶制成,可以将外部刺激转换为传感单元变形。在变形过程中产生电荷转移。四个方形感应单元(长18mm、宽8mm、高40mm)对称安装在方形柔性支架的四个内表面上。
图 1(b) 描绘了摩擦电传感单元的结构,包括具有棘突结构的硅橡胶,旨在在受体附近产生局部和高应力集中,用于消除静电干扰的铸塑聚丙烯 (CPP) 薄膜 , 和喷有导电油墨的 FEP 薄膜。为避免摩擦电层与水接触,两层涂有油墨的 FEP 膜的尺寸与 CPP 膜相同。在它们周围,有两个较大的由 Dragonskin 30 制成的硅胶层,因此硅橡胶可以密封两个摩擦电层。FEP 膜表面的扫描电子显微镜图像,如图 1(b) 底部所示,是以粗糙的图案为特征。这种纳米结构可以提高 TPTS 的表面电荷密度以获得更高的灵敏度。
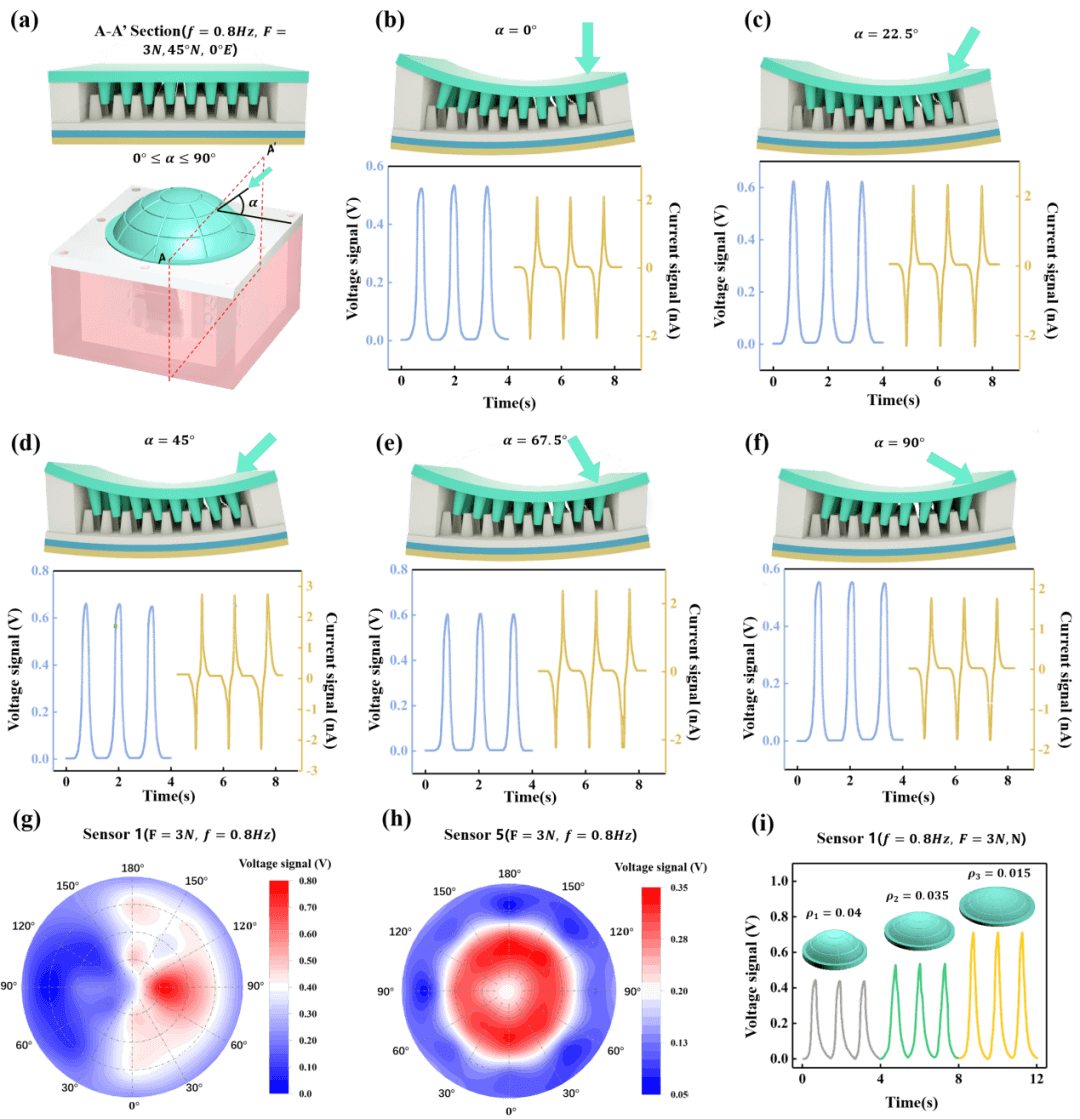 图3 不同荷载方向和位置下TPTS的响应特性。(a)摩擦电感测单元1的初始状态以及外部负载和水平线之间的角度α。(b)角度α= 0°时传感单元1的状态以及感应外部负载的开路电压和短路电流。(c)角度α= 22.5°时传感单元1的状态以及感应外部负载的开路电压和短路电流。(d)角度α= 45°时传感单元1的状态以及感应外部负载的开路电压和短路电流。(e)角度α= 67.5°时传感单元1的状态以及感应外部负载的开路电压和短路电流。(f)角度α= 90°时传感单元1的状态以及感应外部负载的开路电压和短路电流。(g)在F = 3 N、f = 0.8 Hz和α= 90°的条件下,感应单元1感应不同位置刺激的开路电压。(h)在F = 3 N、f = 0.8 Hz和α= 90°的条件下,感测单元5感应不同位置刺激的开路电压。(i)在F = 3 N、f = 0.8 Hz和α= 90°条件下感应不同曲率的柔性覆盖物的开路电压。
图3 不同荷载方向和位置下TPTS的响应特性。(a)摩擦电感测单元1的初始状态以及外部负载和水平线之间的角度α。(b)角度α= 0°时传感单元1的状态以及感应外部负载的开路电压和短路电流。(c)角度α= 22.5°时传感单元1的状态以及感应外部负载的开路电压和短路电流。(d)角度α= 45°时传感单元1的状态以及感应外部负载的开路电压和短路电流。(e)角度α= 67.5°时传感单元1的状态以及感应外部负载的开路电压和短路电流。(f)角度α= 90°时传感单元1的状态以及感应外部负载的开路电压和短路电流。(g)在F = 3 N、f = 0.8 Hz和α= 90°的条件下,感应单元1感应不同位置刺激的开路电压。(h)在F = 3 N、f = 0.8 Hz和α= 90°的条件下,感测单元5感应不同位置刺激的开路电压。(i)在F = 3 N、f = 0.8 Hz和α= 90°条件下感应不同曲率的柔性覆盖物的开路电压。
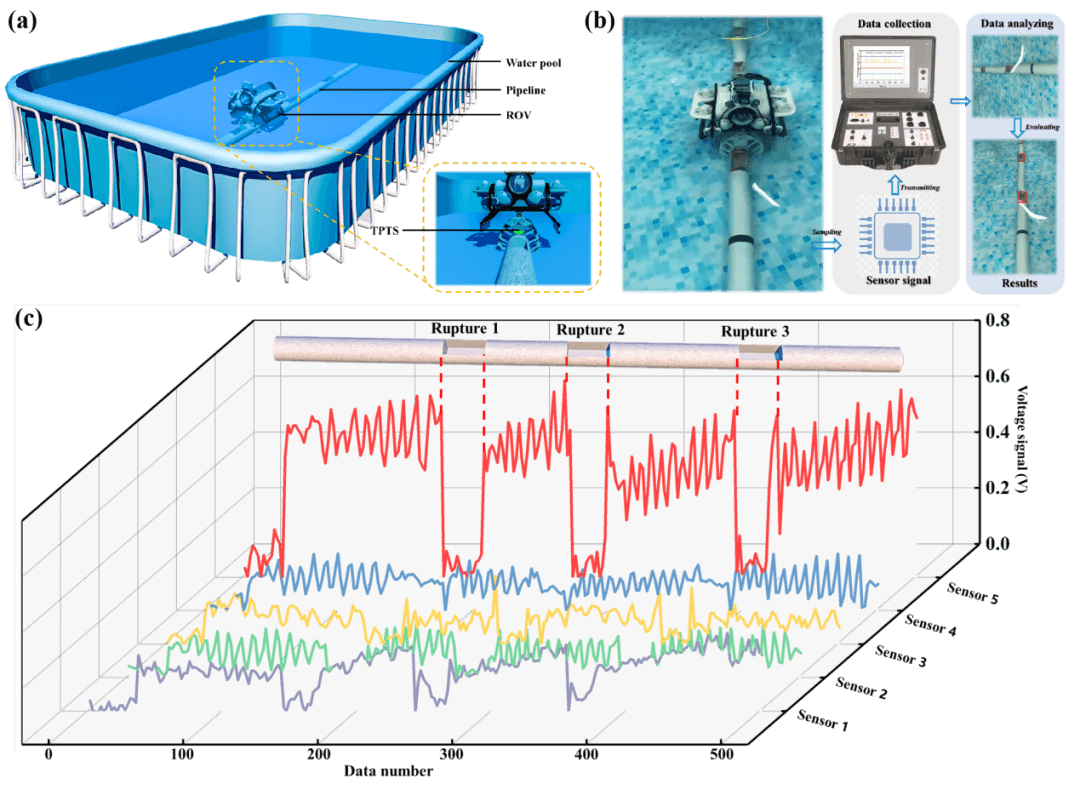 图4 无损水下管道评估实验。(a)水下管道无损检测中管道和传感器的配置。(b)从信号采样到无损水下管道评估的流程。(c)演示TPTS在水下管道无损评价中的应用及其相应的输出电压信号。
图4 无损水下管道评估实验。(a)水下管道无损检测中管道和传感器的配置。(b)从信号采样到无损水下管道评估的流程。(c)演示TPTS在水下管道无损评价中的应用及其相应的输出电压信号。
结论
综上所述,本文提出并研究了一种摩擦电手掌状触觉传感器。该触觉传感器使用输出信号和参数之间的线性关系,分析多个感测单元的接触-分离模式和摩擦电输出来感测外部刺激的幅度、频率和接触面积。另外,TPTS具有棘刺结构,可以实时测量和区分与对象交互时产生的法向力和剪切力。同时TPTS用于控制不同方向的灯的开/关状态,这是利用TPTS高灵敏度方向感应能力的第一步。随后,水下感知触觉系统是通过在ROV上安装与TPTS集成的机械手来获得关于所抓取物体的信息而构建的。提升智能化程度的夹持器能够检测样品的硬度,并在防止破损的同时完成抓取任务。此外,水下感觉触觉系统用于水下管道的无损评估,说明其在各个领域都具有潜在的应用价值。
相关工作以“A bio-inspired and self-powered triboelectric tactile sensor for underwater vehicle perception”为题,发表在npj Flexible Electronics (DOI: 10.1038/s41528-022-00160-0)上。大连海事大学轮机工程学院研究生徐鹏、刘建华、刘翔宇为论文共同第一作者。北京大学谢广明教授、南开大学陶金副教授与大连海事大学徐敏义教授为论文共同通讯作者。
阅读直达链接:
