- 传统的刚性机械手在开展水下打捞和海洋资源管理过程中始终面临着众多挑战,与其相比,柔性机器人抓手可以被动地改变形状和运动姿态,以适应广泛的任务,特别是与非常规物体的交互,能够适应各种形状的物体、减少损伤和污染,表现出非凡的优势。但是,柔性抓取在水下作业任务中面临着复杂水下环境、材料和结构等限制,同时,水下环境的机器人感知和控制也会受限,例如声音、水下信号传输等问题,可能会影响柔性抓取的精度和速度。此外,虽然目前基于水凝胶的软抓手已成为研究热点,但是由于水凝胶的抗脱水性差、易破损,因此回收和废物流污染风险问题大大限制了其大规模应用。
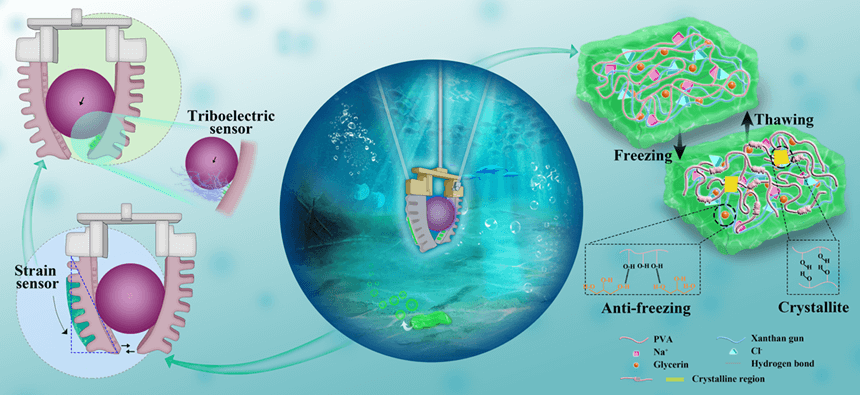
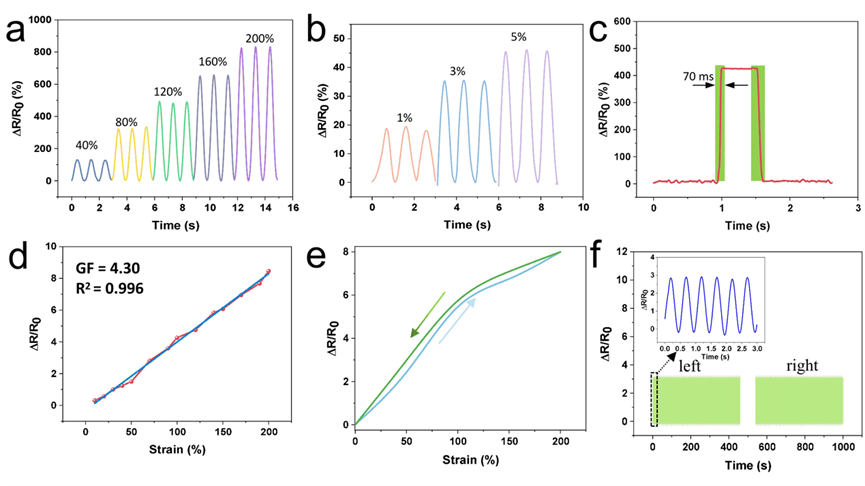 图1 高性能环保型离子水凝胶的应变传感特性
图1 高性能环保型离子水凝胶的应变传感特性
柔性抓手的智能感知功能是水下非结构化、浑浊、干扰等环境下实现安全交互和精准操控任务的必要条件。然而柔性抓手具有无限的被动自由度,且工作在复杂的强非线性环境中,因此为实现柔性抓手的水下智能灵巧操作,需走出传统感知策略,寻找新的基于先进材料的触觉感知技术。此外,考虑到仪器的使用寿命与对水下环境的潜在污染问题,提供一个高效且环保的解决方案十分必要。
近日,清华大学深圳国际研究生院曲钧天助理教授的海洋软体机器人与智能传感实验室(Ocean Soft-Robot and Intelligent Sensing Lab,OASIS-LAB)提出了一种基于高性能环保型离子水凝胶(PXGN IH)的一体化应变-摩擦电传感器,该传感器具有良好的稳定性、响应时间快、低滞后和高灵敏度等优点,且高环保性可避免破损/废旧柔性抓手对海洋环境的污染。
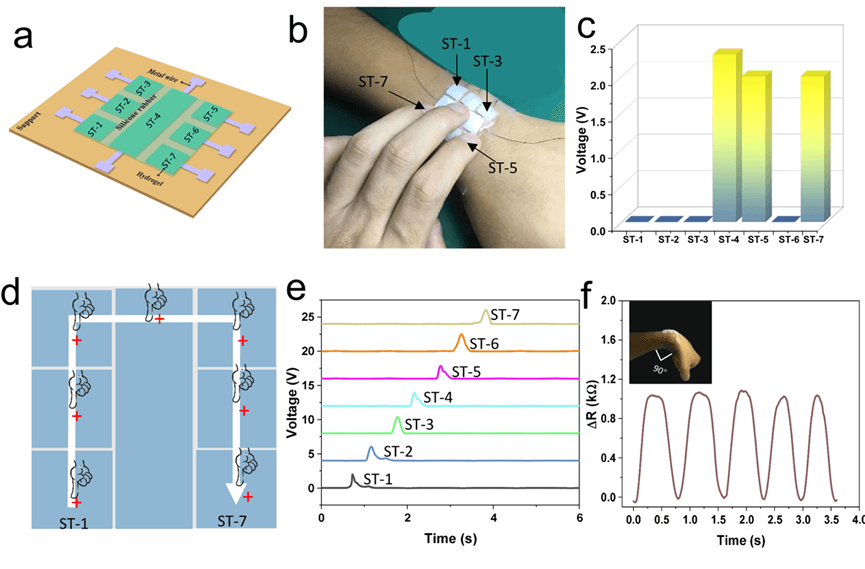 图2 可穿戴应变-摩擦电柔性传感皮肤
图2 可穿戴应变-摩擦电柔性传感皮肤
- 基于高性能环保离子水凝胶开发的双模态可穿戴皮肤具备对外部刺激进行空间映射及检测手腕运动状态的能力。将应变-摩擦电双模态传感器集成到软抓手上可实时准确检测并预警水下抓取过程中的不稳定状态(意外干扰、滑动或碰撞),防止潜在的作业失败。该工作研发的一体化应变-摩擦电传感器在提升水下软体机器人搭载的柔性机械手的主动感知能力方面具有很大应用潜力。
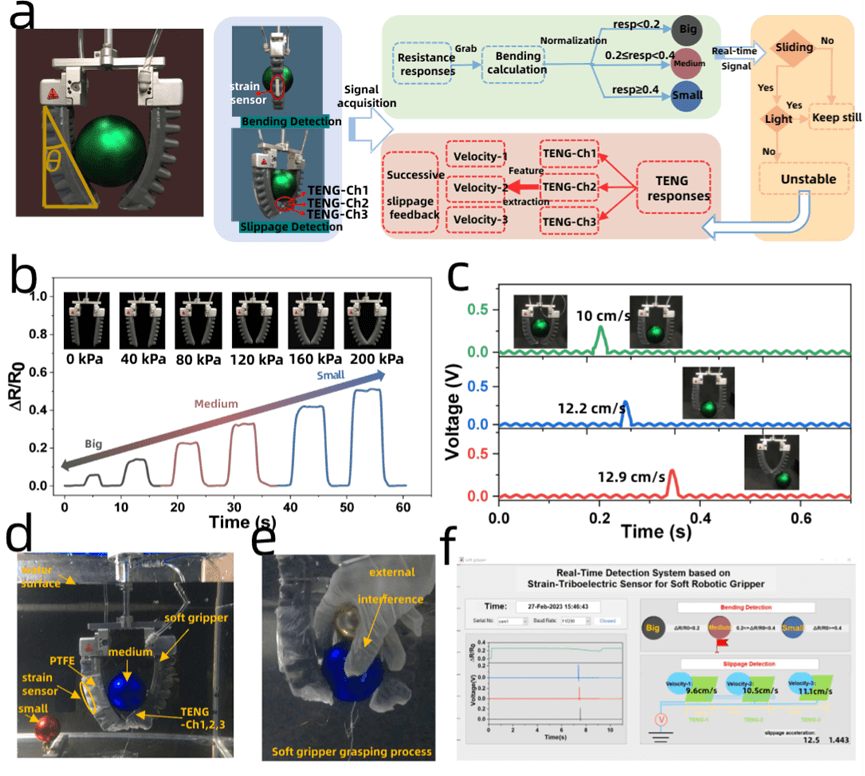 图3 水下机器人柔性抓取实时状态检测与故障预警
图3 水下机器人柔性抓取实时状态检测与故障预警
相关研究成果以“面向可穿戴传感和水下机器人柔性抓取的环境友好型离子水凝胶一体式应变-摩擦电传感器研究” (All-in-one Strain-triboelectric Sensors Based on Environment-friendly Ionic Hydrogel for Wearable Sensing and Underwater Soft Robotic Grasping)为题,发表在国际期刊《纳米能源》(Nano Energy)上。
清华大学深圳国际研究生院曲钧天助理教授为论文的第一作者与通讯作者,大连海事大学徐敏义教授为共同通讯作者。论文作者还包括重庆邮电大学2020级硕士生袁强静、北京交通大学李振坤助理教授、江南大学樊启高教授以及清华大学深圳国际研究生院王自强助理教授、徐峰讲师、张旻副教授、钱翔副教授、王学谦教授与王晓浩教授。
该项目得到了国家自然科学基金、深圳市“鹏城孔雀计划”、北京市“青年人才托举工程”、 清华大学深圳国际研究生院交叉科研创新基金和大连市杰出青年科技人才等项目的资助。
转载链接:
