背景介绍
- 鱼类能够通过其外侧神经丘感知来自水生环境的不同信号。鉴于此,本文开发了一种具有多模态传感功能的人工鱼外侧神经丘(AFLN)系统。AFLN 的直径小于 6 毫米,展示了紧凑的三维架构,同时能够检测水下的水流、声学信号和电场。将 AFLN 系统集成到水下机器人中可增强自主导航、避障和紧急逃生功能,展示初级机器智能。这种紧凑、轻便的仿生多模态传感器在提高水下机器人的感知能力方面具有巨大的潜力。
成果简介
中国科学院北京纳米能源与系统研究所唐伟团队开发了一种能够实现多模态感知的人工鱼侧线系统,可以感知并分辨水流、声信号和电场。相关研究以“Bionic underwater multimodal sensor inspired by fish lateralis neuromasts”为题发表在Cell旗下新期刊《Device》上。纳米能源所博士生舒生和博士生王廷宇为共同第一作者,唐伟研究员为通讯作者。
图文导读
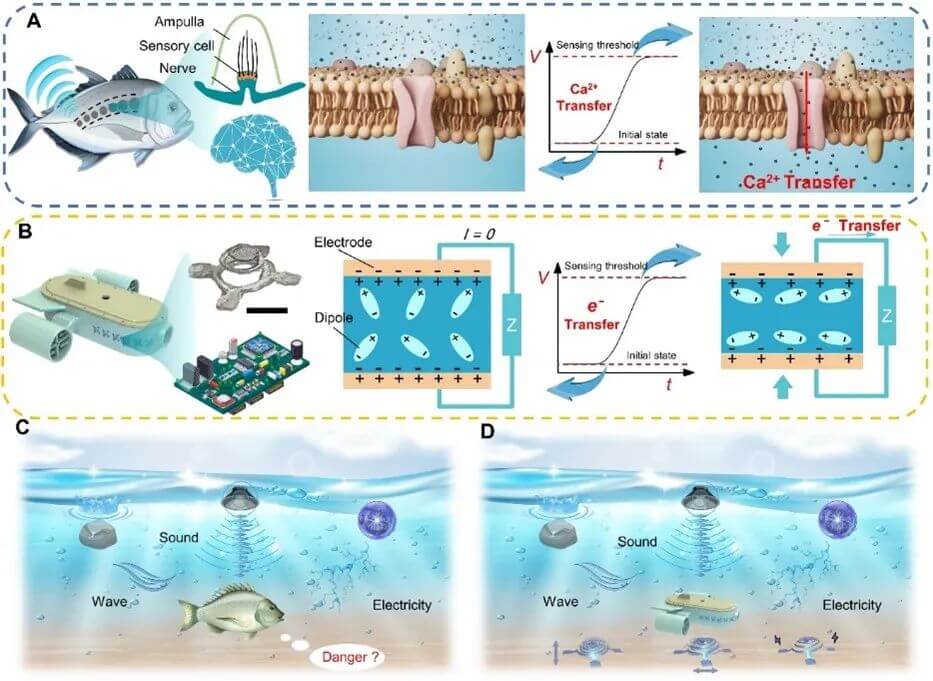 图1. 仿生结构及原理。(A)鱼类侧线系统的结构和传感方法。鱼类通过周围皮孔检测水流、声音和电等信号,触发神经细胞离子通道的开放和兴奋性递质的释放,从而产生感觉反应。(B) AFLN系统结构和传感方法。插图展示了其在水下机器人技术中的潜在应用。比例尺:2 毫米。(C) 鱼类可以借助侧线系统感知微弱的水流变化、声信号和水下电场。(D) 水下机器人还可以借助AFLN系统的不同响应来识别水波、水声和水下电场。
图1. 仿生结构及原理。(A)鱼类侧线系统的结构和传感方法。鱼类通过周围皮孔检测水流、声音和电等信号,触发神经细胞离子通道的开放和兴奋性递质的释放,从而产生感觉反应。(B) AFLN系统结构和传感方法。插图展示了其在水下机器人技术中的潜在应用。比例尺:2 毫米。(C) 鱼类可以借助侧线系统感知微弱的水流变化、声信号和水下电场。(D) 水下机器人还可以借助AFLN系统的不同响应来识别水波、水声和水下电场。
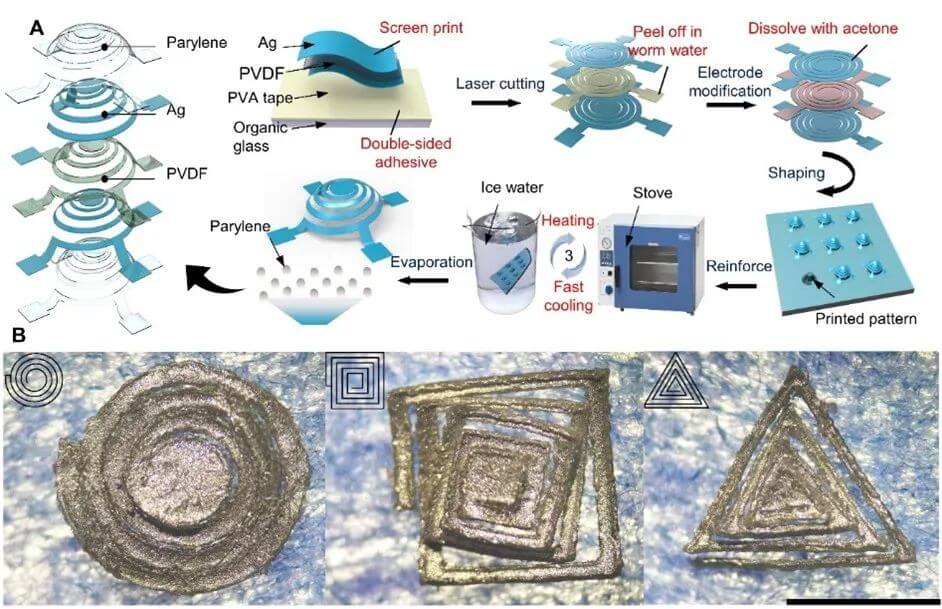 图 2. AFLN 的制造过程。(A) AFLN 的准备流程图。(B) 激光切割后不同图案的比较。光滑的圆形形状更加稳定。比例尺:2 毫米。
图 2. AFLN 的制造过程。(A) AFLN 的准备流程图。(B) 激光切割后不同图案的比较。光滑的圆形形状更加稳定。比例尺:2 毫米。
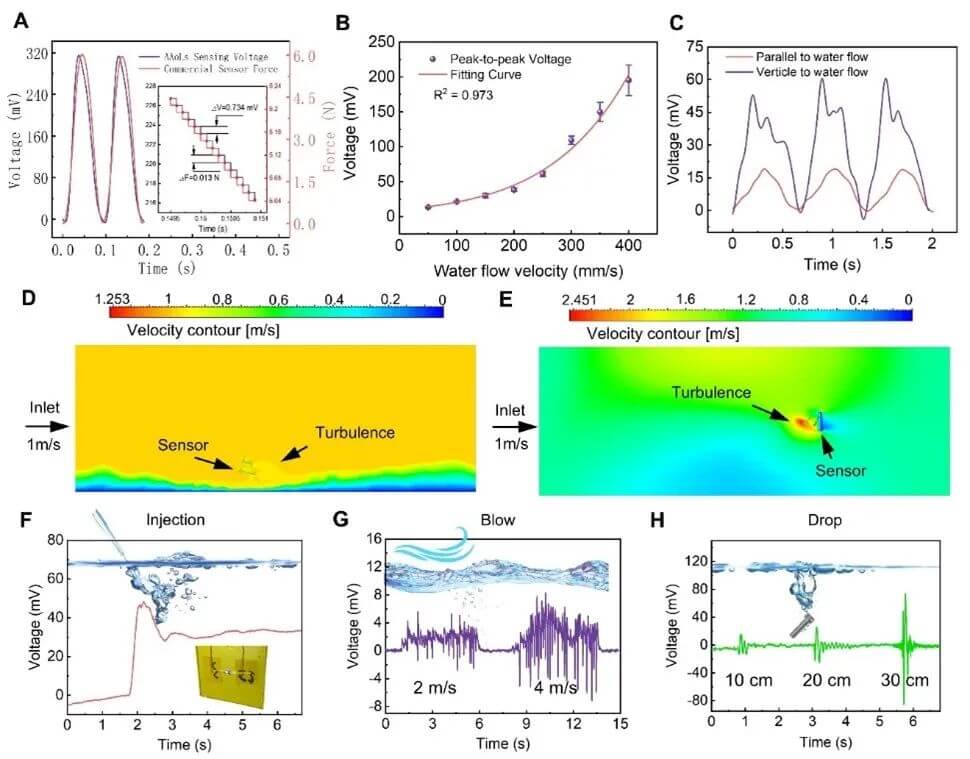 图 3.AFLN 对水压的响应。(A) AFLN 与力传感器串联情况下的力和输出电压比较。(B) 不同水流速度下的输出电压。(C) 不同方向水流下输出电压的比较。(D) 传感器与流场平行时的计算流体动力学 (CFD) 模拟。(E) 传感器垂直于流场时的 CFD 模拟。(F-H) AFLN 对不同弱机械刺激的反应。用橡胶头滴管在附近注入水(F),用吹风机吹水面(G),将小螺丝从不同高度扔入水中(H)。
图 3.AFLN 对水压的响应。(A) AFLN 与力传感器串联情况下的力和输出电压比较。(B) 不同水流速度下的输出电压。(C) 不同方向水流下输出电压的比较。(D) 传感器与流场平行时的计算流体动力学 (CFD) 模拟。(E) 传感器垂直于流场时的 CFD 模拟。(F-H) AFLN 对不同弱机械刺激的反应。用橡胶头滴管在附近注入水(F),用吹风机吹水面(G),将小螺丝从不同高度扔入水中(H)。
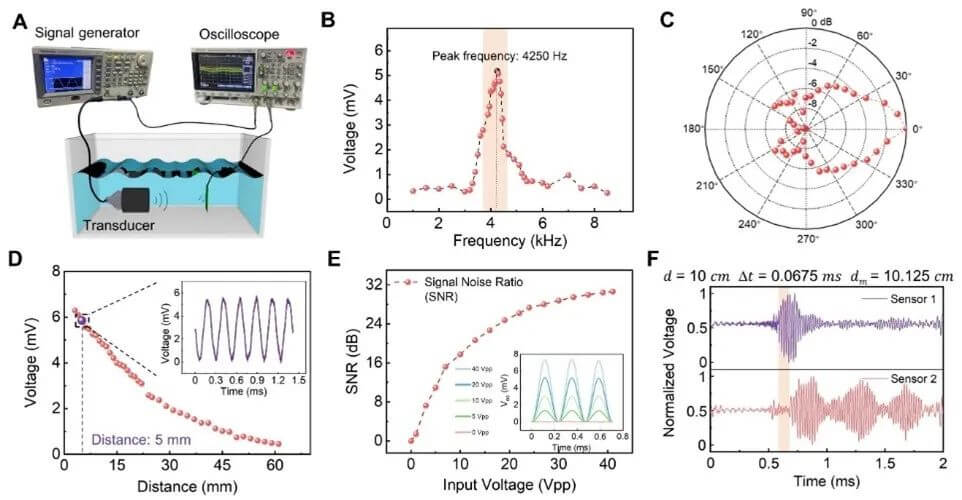 图 4. AFLN 的声学特性。(A)高频测试实验装置示意图。(B) 不同声频下 AFLN 的输出电压。谐振频率约为4250 Hz。(C) 不同方向模式。(D) 不同声源距离处 AFLN 的输出电压。(E) 不同输入能量下 AFLN 的信噪比和输出波形。(F) 使用 AFLN 对声波响应的时间差进行测距。
图 4. AFLN 的声学特性。(A)高频测试实验装置示意图。(B) 不同声频下 AFLN 的输出电压。谐振频率约为4250 Hz。(C) 不同方向模式。(D) 不同声源距离处 AFLN 的输出电压。(E) 不同输入能量下 AFLN 的信噪比和输出波形。(F) 使用 AFLN 对声波响应的时间差进行测距。
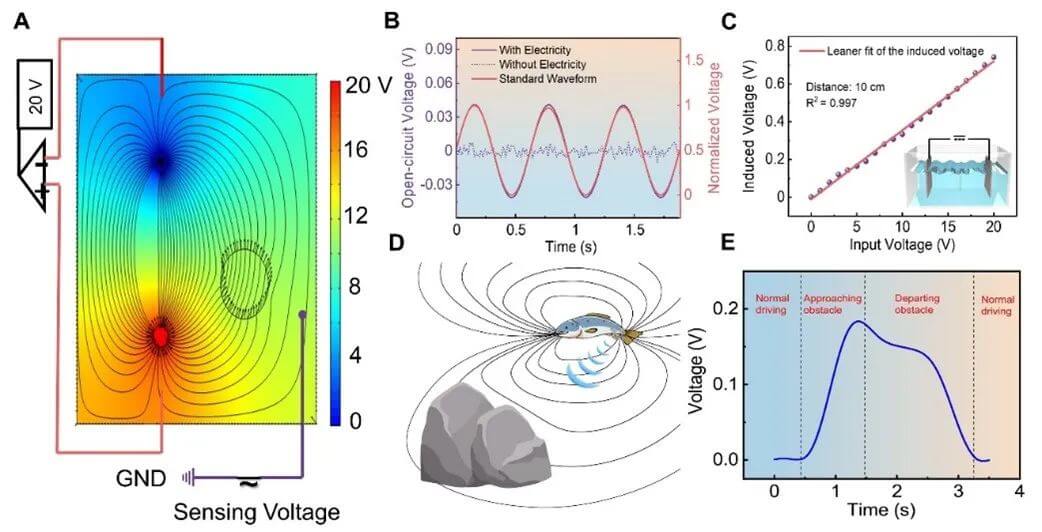 图5. AFLN对水下电场的特性。(A)电传感器原理示意图。(B) 电传感器在平行板电场作用下可以获得与标准水波(红色)相同的幅值相位信息(蓝色)。当去除电场并施加标准波时,电传感器没有相应的响应(蓝色虚线)。(C) AFLN 对基于平行板的水下电场输入电压的响应。(D) AFLN 通过电场检测静止障碍物。(E) 避障期间的 AFLN 输出。
图5. AFLN对水下电场的特性。(A)电传感器原理示意图。(B) 电传感器在平行板电场作用下可以获得与标准水波(红色)相同的幅值相位信息(蓝色)。当去除电场并施加标准波时,电传感器没有相应的响应(蓝色虚线)。(C) AFLN 对基于平行板的水下电场输入电压的响应。(D) AFLN 通过电场检测静止障碍物。(E) 避障期间的 AFLN 输出。
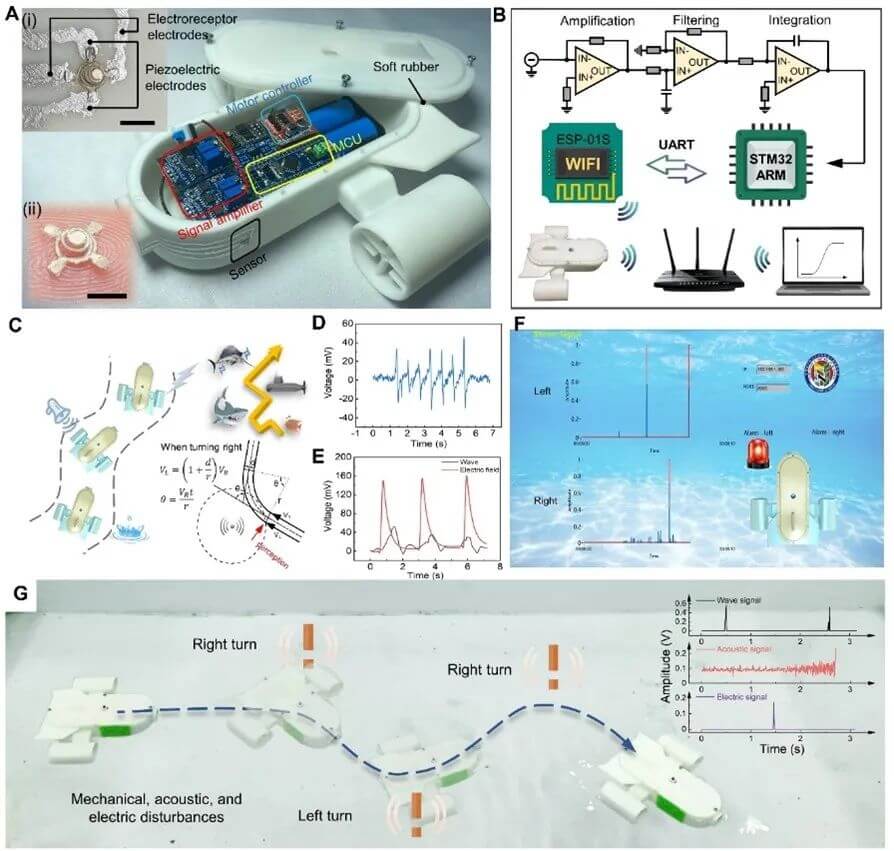 图 6. AFLN 系统在机器人避障中的应用演示。(A) 配备 AFLN 系统的 AUV 照片。(B)系统工作原理。控制系统由信号采集、处理、放大、传输等模块组成,可实现AFLN传感器对水下机器人的自动控制。(C) AUV系统导航策略和轨迹。插图为碰撞角度和左右差速获取方法示意图。(D) 感知动态波环境中的机械刺激。(E) 同时应用波和电场刺激。(F)自主避障电压显示程序。实时信号由红线表示,而电压电位由蓝线表示。(G) AUV 避障应用示意图。插图展示了从系统获取的实时信号。
图 6. AFLN 系统在机器人避障中的应用演示。(A) 配备 AFLN 系统的 AUV 照片。(B)系统工作原理。控制系统由信号采集、处理、放大、传输等模块组成,可实现AFLN传感器对水下机器人的自动控制。(C) AUV系统导航策略和轨迹。插图为碰撞角度和左右差速获取方法示意图。(D) 感知动态波环境中的机械刺激。(E) 同时应用波和电场刺激。(F)自主避障电压显示程序。实时信号由红线表示,而电压电位由蓝线表示。(G) AUV 避障应用示意图。插图展示了从系统获取的实时信号。
总结
- 本文制造了一种AFLN 传感系统。它的尺寸小于6毫米,能够感知微小的水流、声压和电场,以如此紧凑的形式展示了其多模态传感能力。当多个信号共存时,低幅度、高频的声音信号叠加在高幅度、低频的波信号上,因此,我们可以通过傅里叶变换来区分这两个信号。同时,电信号被各种电极捕获。因此,这三个信号可以单独分析。利用AFLN系统的多种感知能力,自主水下航行器(AUV)可以有效避开障碍物或逃避外部刺激。此外,我们提出的后加固方法提供了一种简便可行的方法来增强三维结构的耐久性,从而促进多模态传感器的响应。我们预计这些紧凑型多功能传感器有潜力显着推进智能机器人的发展,以满足未来水下应用的巨大需求。
转载链接:
