新闻
- 近期,大连海事大学徐敏义教授团队与北京大学谢广明教授团队、南开大学陶金副教授合作,设计一种基于摩擦纳米发电机工作原理的仿生触觉感知系统,应用于机器人自主反应式避障和局部地图构建,为机器人在未知环境中探索作业提供新策略,相关成果以“A Triboelectric-Based Artificial Whisker for Reactive Obstacle Avoidance and Local Mapping”为题发表于Research上。
研究背景
- 近年来,研究者们通过为机器人构建各种类型的感知系统,来赋予机器人探测评估环境的能力,典型的传感器与感知系统如摄像头、陀螺仪、激光测距仪和惯性导航系统等。与传统感知方式相比,触觉感知作为一种直接接触式感知方式对于提高机器人在未知环境中对物体位置、方向感知的能力起到至关重要的作用,但受限于机器人的体积和有效载荷能量,目前少有适用于机器人环境探测的触觉传感器。此外,现有的触觉传感器因重量、尺寸、功耗等限制无法为机器人提供可靠的触觉信息。因此,为机器人提供有效触觉感知信息仍然是一项富有挑战的工作。
研究进展
- 大连海事大学徐敏义教授团队受到鼠类触须毛囊结构的启发,结合接触分离式摩擦纳米发电机原理,于2020年首次提出和报告了基于摩擦纳米发电机的仿生触觉传感器(TWS),该传感器具有易于制造、体积小、重量轻、灵敏度高、稳定性好等优点。在黑暗环境中,鼠类可以利用触须通过对障碍物方向和距离进行测量,实现 自身避障和未知环境探索(图1(a-b))。鼠类触须具有毛囊结构,该结构可接收 作用于触须的外部扰动,随后将扰动信息传递到神经支配区,最终将机械信号转 换成神经信号为鼠类提供触觉信息(图1(d-e))。受该生物学结构启发,团队进一步设计了一种仿生触觉传感器 TWS(图1(c)、图1(f))。TWS 由记忆合金触须、柔性硅胶关节、聚四氟乙烯(PTFE)小球、Ti-Ni 合金弹簧、四个方向的铜电极和 3D 打印的圆柱形外壳、底座组成(图1(c))。该传感器基于接触分离式 摩擦纳米发电机原理(图1(g-h)),其自供能特性与轻巧的体积可应用于各类机器人。
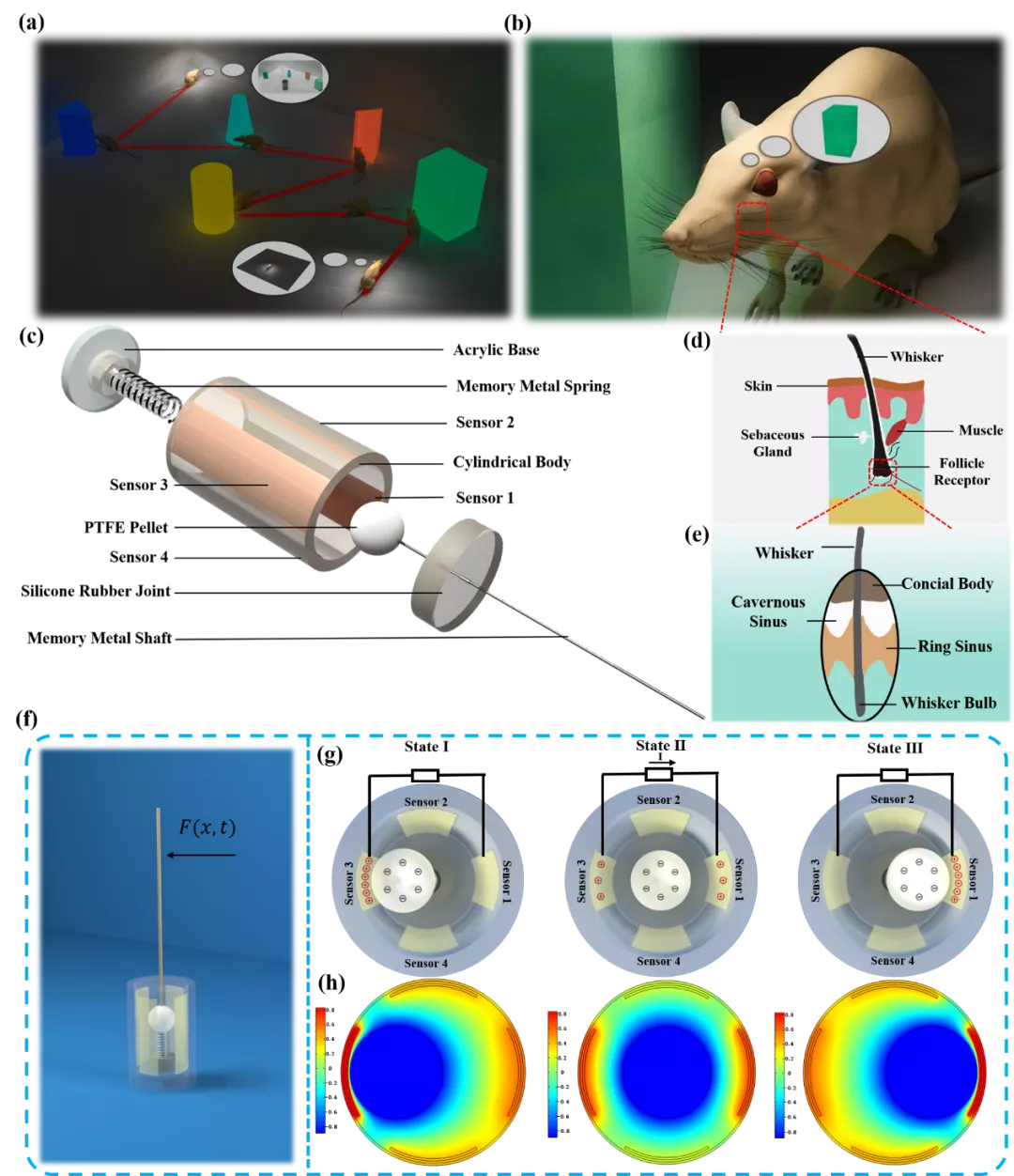 图1 TWS的结构和工作原理
图1 TWS的结构和工作原理
- 经后续研究,团队将TWS 阵列与信号采集、信号处理模块相结合,成功构建机器人触觉感知系统,通过直接接触式感知,为机器人提供精确、可靠的触觉感知信息。为进一步证明 TWS 的有效性和适用性,对集成了触觉感知系统的JetBot 进行反应式避障和局部地图构建测试。测试空间由一个 3.6m 的封闭区域组成,在该区域放置了三个固定地标障碍物 (图2(a))。当 TWS 与障碍物 发生接触时,TWS 会产生电信号,该电信号由 Teensy 3 .5 模块将其传输到 JetBot, 由其内部的 ARM A57 处理器进行数据处理,最终将处理信息发送到计算机(图2(b))。此外,为跟踪机器人轨迹,JetBot利用位于驱动电机上的编码器信息进行航位推算。在规定的测试空间中,JetBot沿着预先规划的路径自主行驶,当地标障碍物被TWS识别时,反馈控制器会确定障碍物方向,同时使机器人偏离其原始轨迹:首先,JetBot沿原始方向进行反向运动,产生最大5cm的纵向位移,然后朝远离障碍物的方向转15°,当JetBot离开地标障碍物后,它就返回到原始规划轨迹继续运动(图2(d))。该测试展示了使用TWS构建低成本和精确触觉感知的反应式避障系统的可行性。
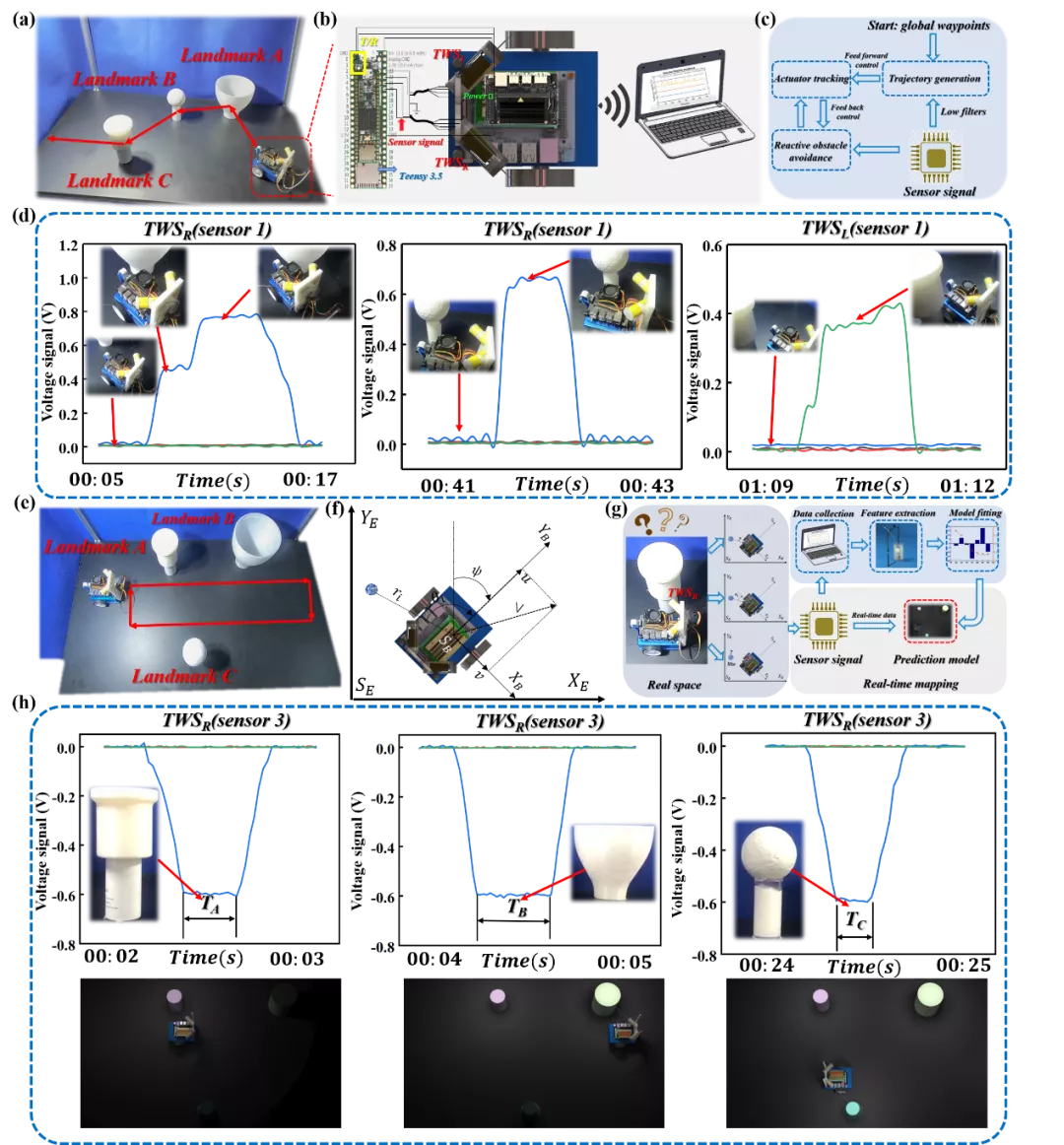 图2 基于TWS的触觉感知系统应用于反应式避障和局部地图构建
图2 基于TWS的触觉感知系统应用于反应式避障和局部地图构建
- 在局部地图构建测试中,三个固定地标在测试空间中被重新定位(图2(e))。在该测试中,机器人不但要对自身的位置有准确的估计,同时还要对获得的障碍物位置信息进行坐标系转化,把位置信息从自身坐标系转换到空间坐标系中(图2(f)),进而通过特征提取、模型拟合、模型预测等过程实现真实空间坐标系下的局部地图构建(图2(g))。机器人通过触觉对障碍物进行接触识别后,对障碍物场进行了精准还原(图2(h))。该测试证明了基于TWS的局部地图构建方法的可行性,同时为机器人触觉应用中的同时定位与构图提供了新策略。
未来展望
- 论文提出了一种基于 TWS 的触觉感知系统,该系统对方向性负载和外部刺 激具有高灵敏度特性,可将来自 TWS 的信号进行实时处理及模型拟合,同时该 感知系统使用回归模型检测地标障碍物的位置及其方向,为机器人提供反应式避 障和局部地图构建能力。因此,基于 TWS 的触觉感知系统能够实现对现有机器 人等智能装备感知系统的补充,扩展感知维度,可广泛应用于自动化领域。
站内直达链接:
