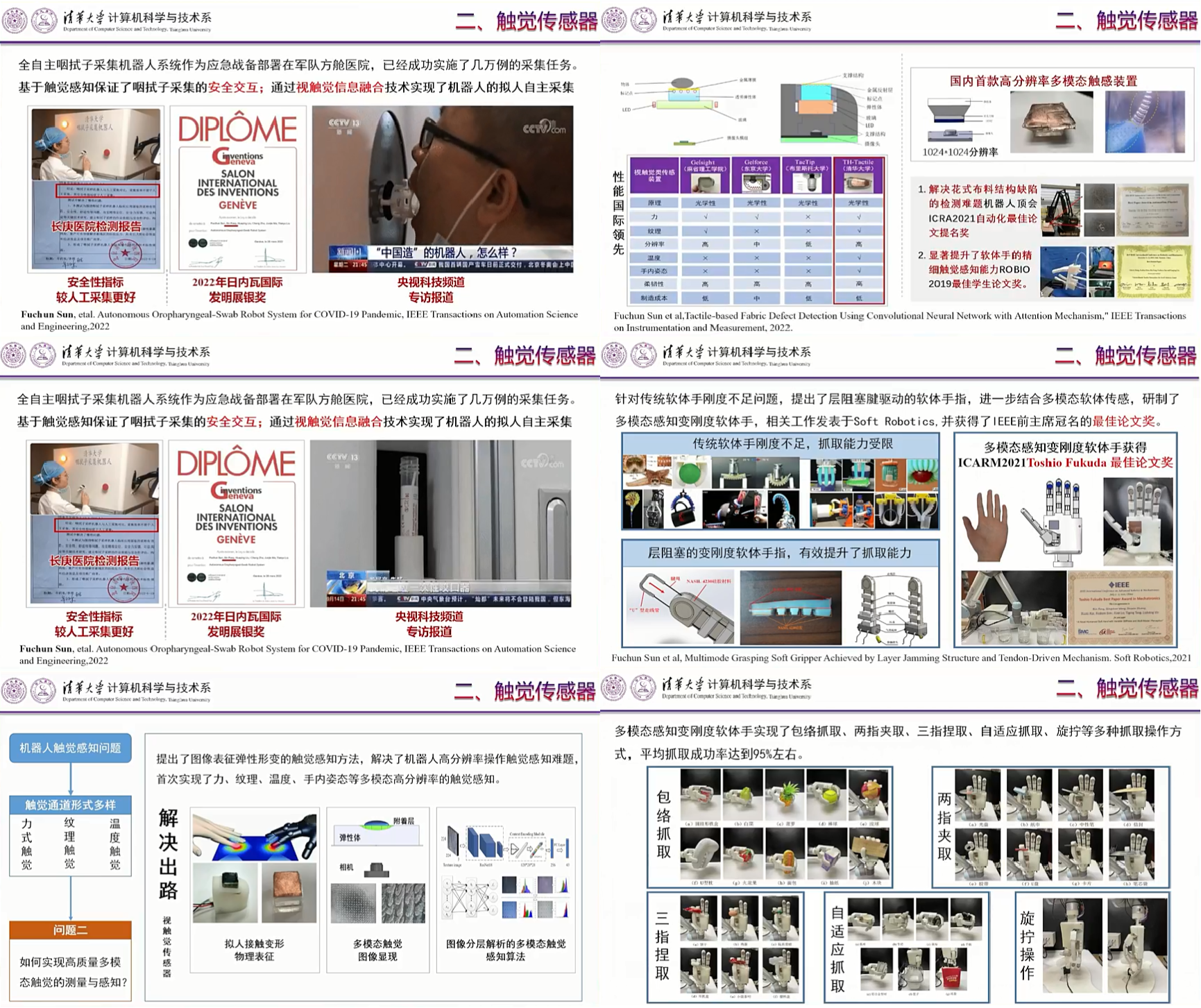
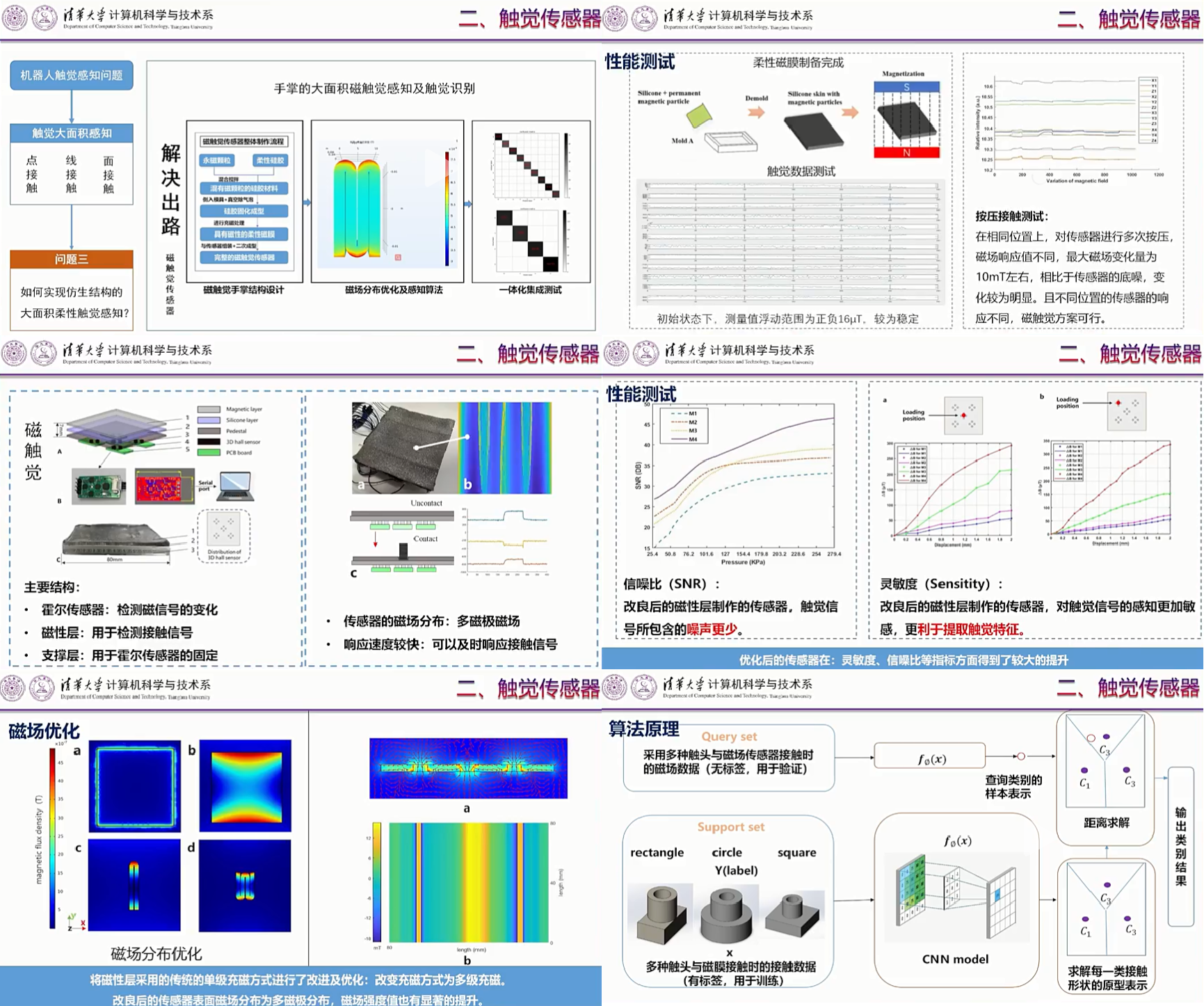
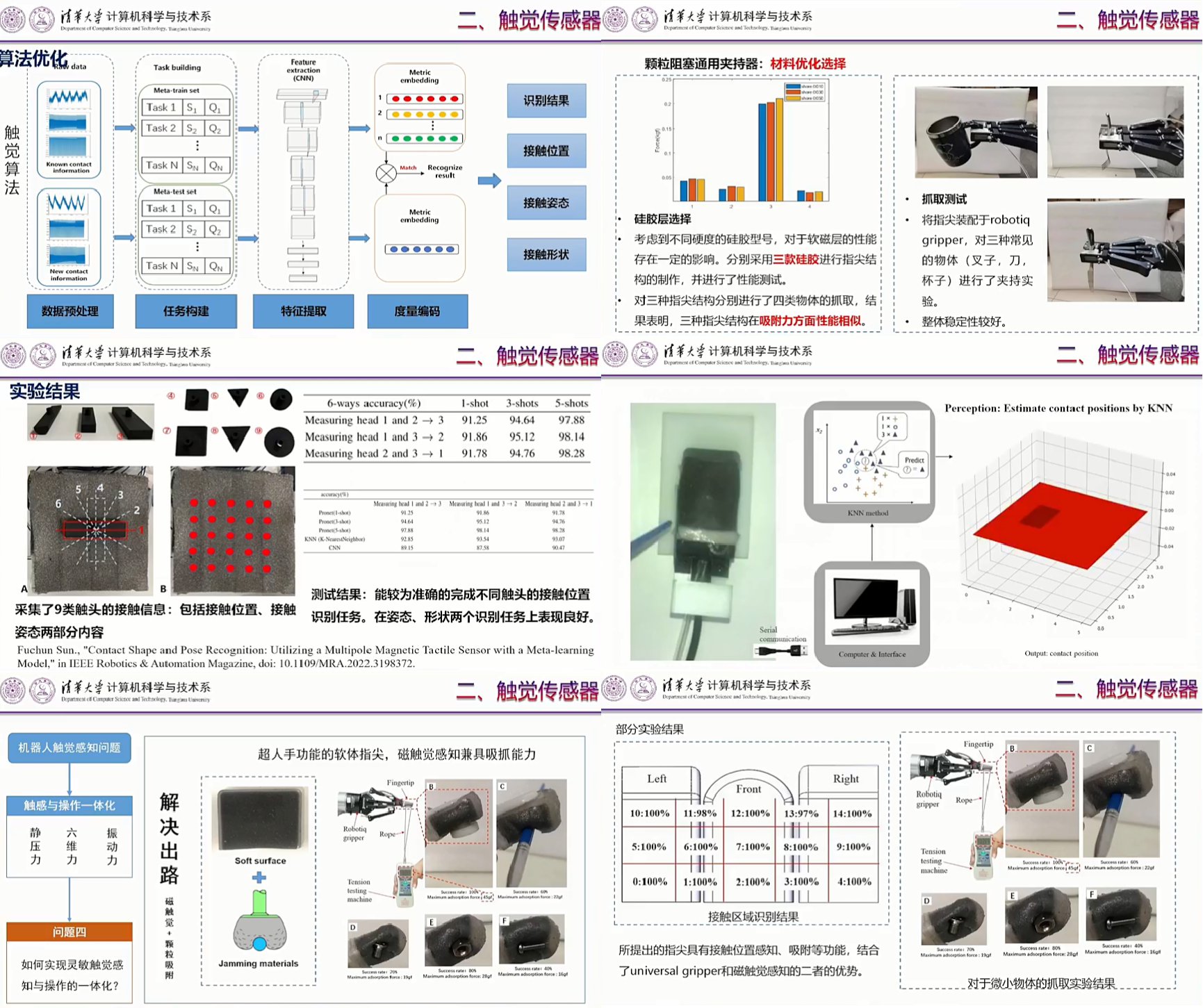
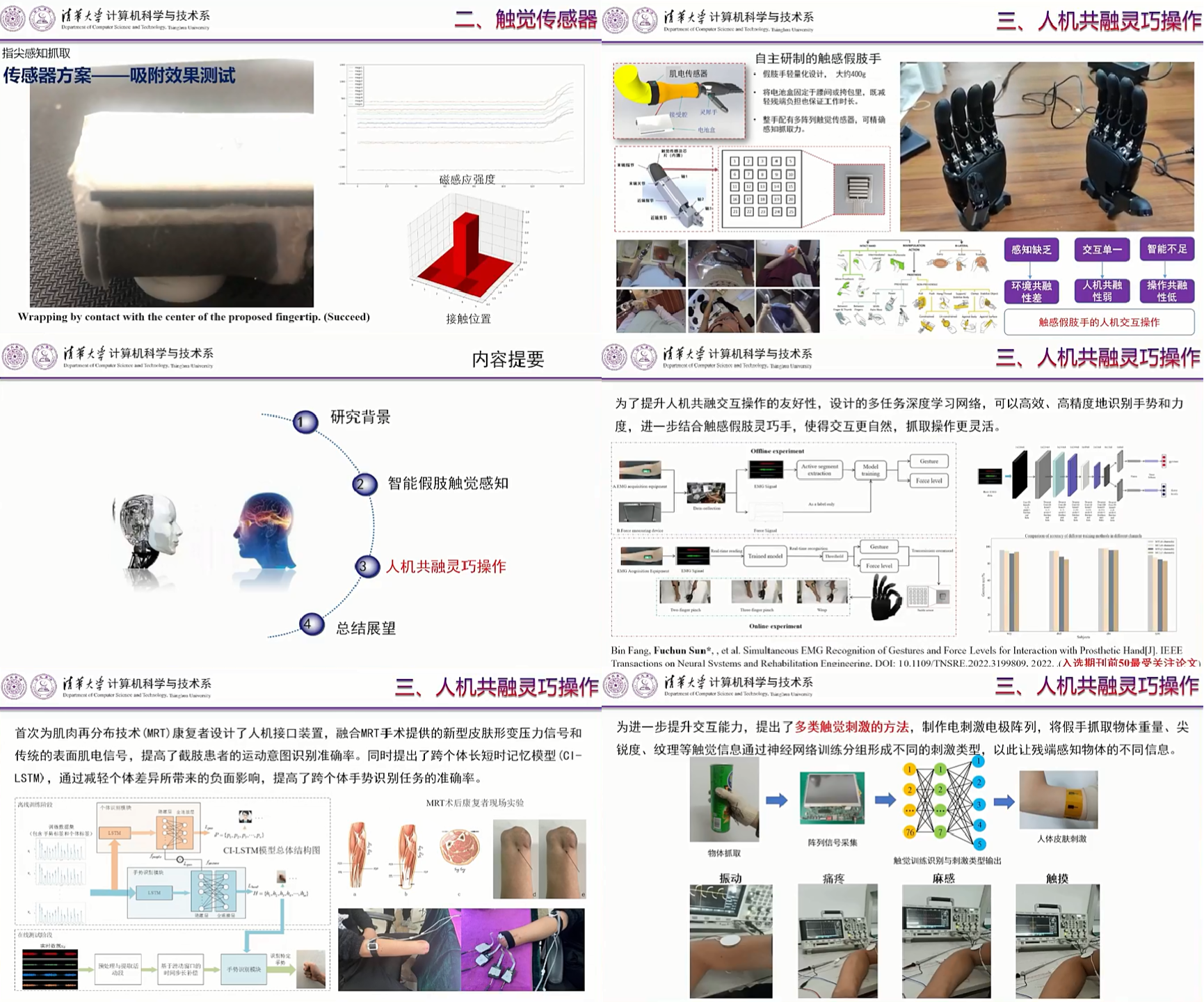
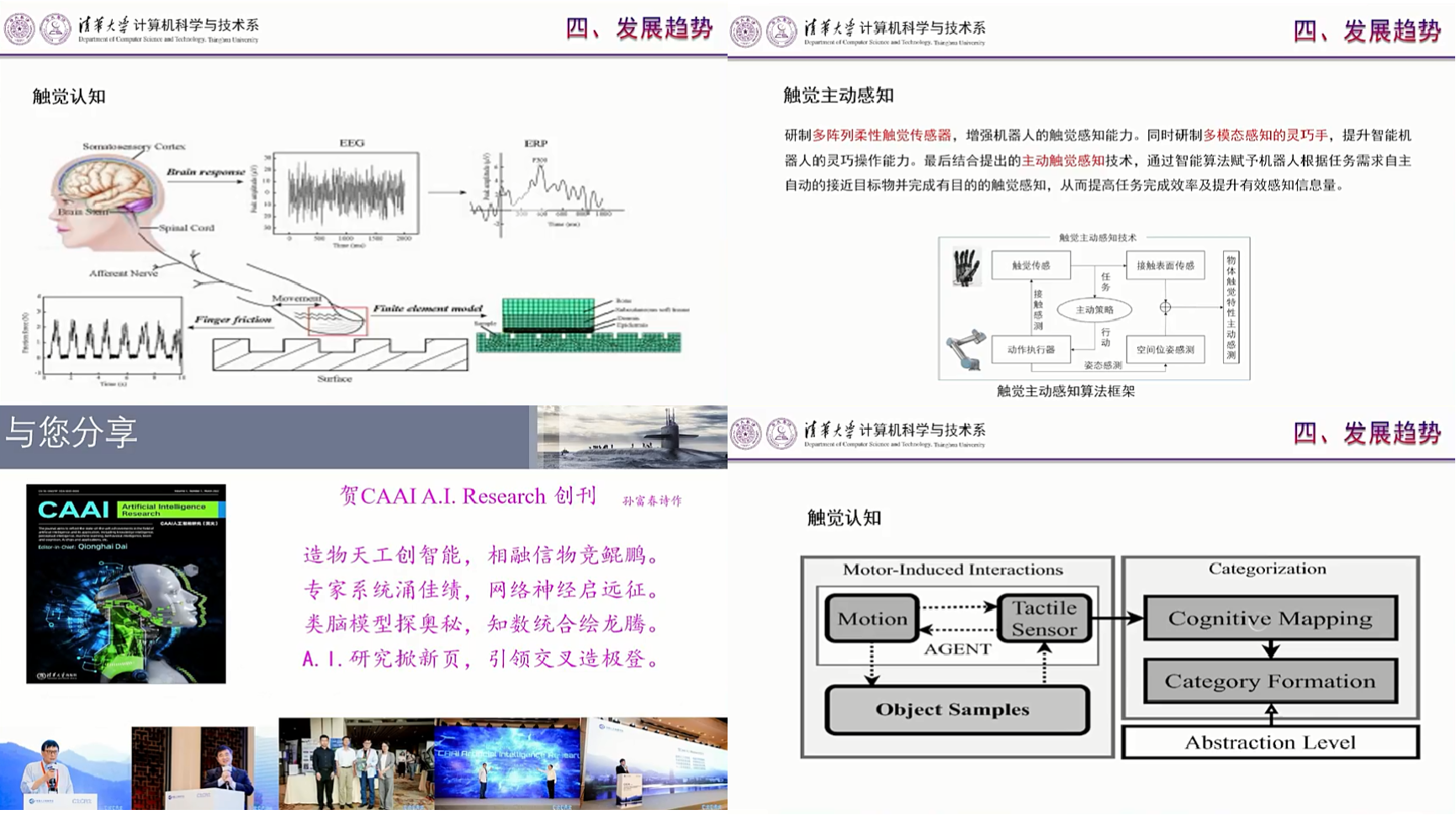
- 大学计算机科学与技术系孙富春教授分享《触觉感知的问题与出路?》主题报告,指出随着触觉传感器的发展及性能的提升,触觉感知领域迎来了前所未有的进展。触觉是用于获取环境信息的一种重要知觉形式,是人类与外界交流的重要通道。如何能让机器人拥有人类一样的触觉感知能力一直是学术界和工业界探讨的热点问题,而触觉传感器作为机器人获取触觉感知的装置也被中国日报评为了35项卡脖子技术之一。本报告将围绕触觉感知“脖子”卡在哪里的问题展开讨论。首先以“机器人如何获得像人一样感知能力”为题,分别从“密度、模态、区域、量程”以及“动态性、稳定性”的角度分析了现有触觉传感器的主要不足、技术瓶颈和可能的解决途径。其次以“触觉传感器如何提高机器人的认知能力和精准操作能力”为题,讨论了触觉表征、视触觉联合表征与融合实现操作目标物体特性、形态识别,以及操作技能的学习问题。接着,介绍了研究团队在触觉传感器以及机械手灵巧操作方面最新研究成果。最后,对机器人触觉感知研究进行了总结和展望。



转载链接:
