- 清华大学深圳国际研究生院曲钧天团队和浙江大学李铁风团队合作在水下软体机器人领域发表综述论文,这项工作系统梳理了不同类型的基于仿生学的水下软体机器人,总结归纳了水下软机器人在智能软材料及其制造技术、驱动、运动模式、能量存储、传感、控制和建模方法等方面的最新进展。最后,文章探讨了该领域现有挑战和发展前景。本综述旨在为未来水下软体机器人技术的发展和实际应用提供重要指导。
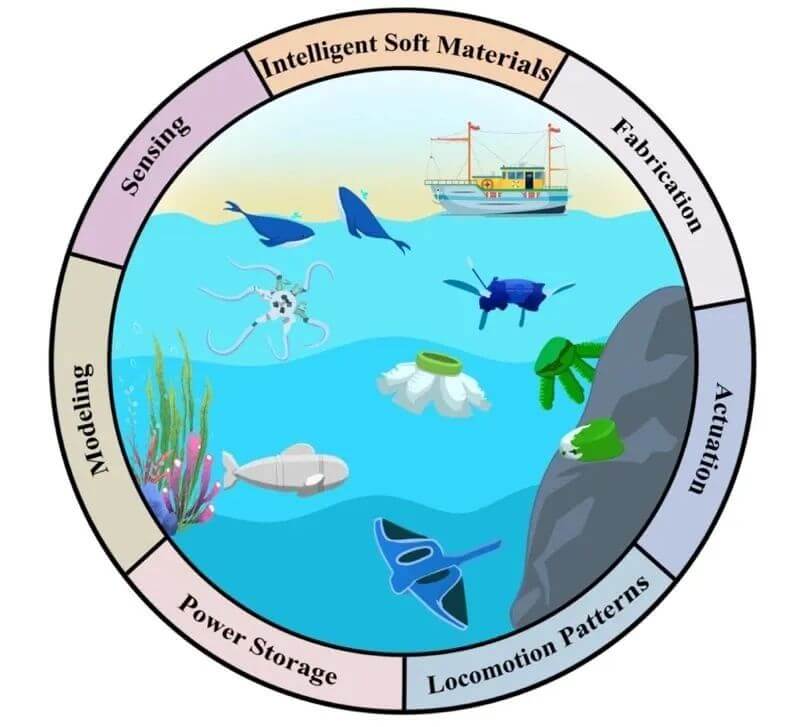 图1 水下软体机器人技术
图1 水下软体机器人技术
水下机器人的开发对于海洋复杂环境下的资源勘探和开发等特定任务具有重要价值。传统刚性水下机器人(AUVs和ROVs)具有坚硬的刚性外壳,尺寸较大,因此,环境适应性差,与海洋生物接触时容易对其造成伤害,在狭窄的水下空间难以操作。此外,传统刚性机器人多采用的水下喷射推进的驱动方式会对水下环境造成巨大的干扰。然而,软体机器人是由兼容材料(聚合物、弹性体、水凝胶、颗粒)制造的机器,具有优越的变形能力、环境适应性,且驱动控制较为简单,适合应用于海洋环境。值得注意地,根据应用场景,软体机器人可分为水下软体机器人、陆地软体机器人和空中软体机器人。只要能在水中工作,就属于水下软体机器人,因此,水陆两栖软机器人也被视为水下软机器人。水下软体机器人可以解决传统刚性水下机器人的性能缺陷,具有较大的研究前景。
水下软体机器人的开发综合了材料学、控制科学与工程、计算机科学与技术、流体力学和机械工程等学科的基础知识,旨在探索机器人领域的最新技术。近年来,随着世界各国越来越鼓励多学科交叉研究,许多用于不同的目的水下软体机器人被研究和开发出来。通过与仿生技术相结合,机器人可以很好地利用生物的顺应性,在复杂的海洋环境中安全、高效、准确地完成任务。
作者在文章中首先比较了各种水下刚性机器人与水下软体机器人的速度和尺寸(图2),显然,水下软体机器人比传统的水下刚性机器人具有更宽的速度范围和尺寸跨度。
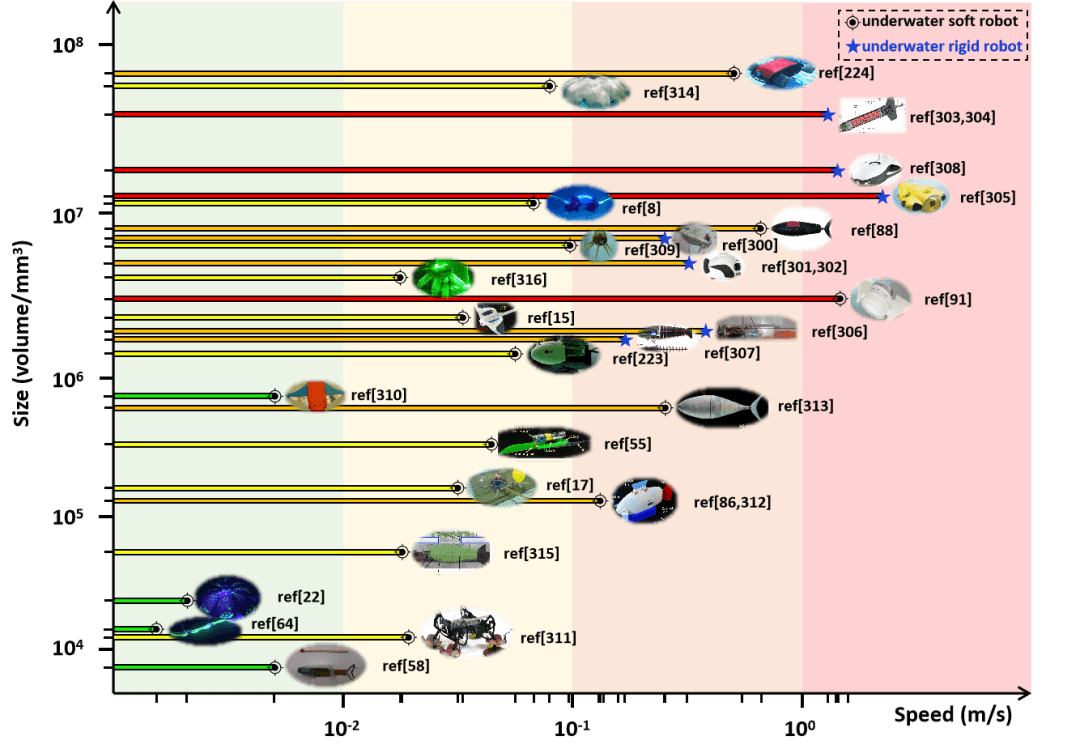 图2 各种水下刚性机器人(黑色)与水下软体机器人(蓝色)的速度和尺寸
图2 各种水下刚性机器人(黑色)与水下软体机器人(蓝色)的速度和尺寸
- 该文章以时间线的形式汇总了自2000年至2023年期间部分具有代表性的受生物启发的水下软体机器人研究成果,并以时间轴图的形式展示了水下软体机器人从实现简单功能到具备综合能力的逐渐进步(图3)。水下软体机器人已经从最初单一的软执行器功能扩展到具有水下巡航、操作、环境感知、多运动模式自由切换等一系列复杂的功能。软体机器人技术与软材料技术实现更好地结合,利用软材料实现了性能更优越、设计制造更简单的结构。
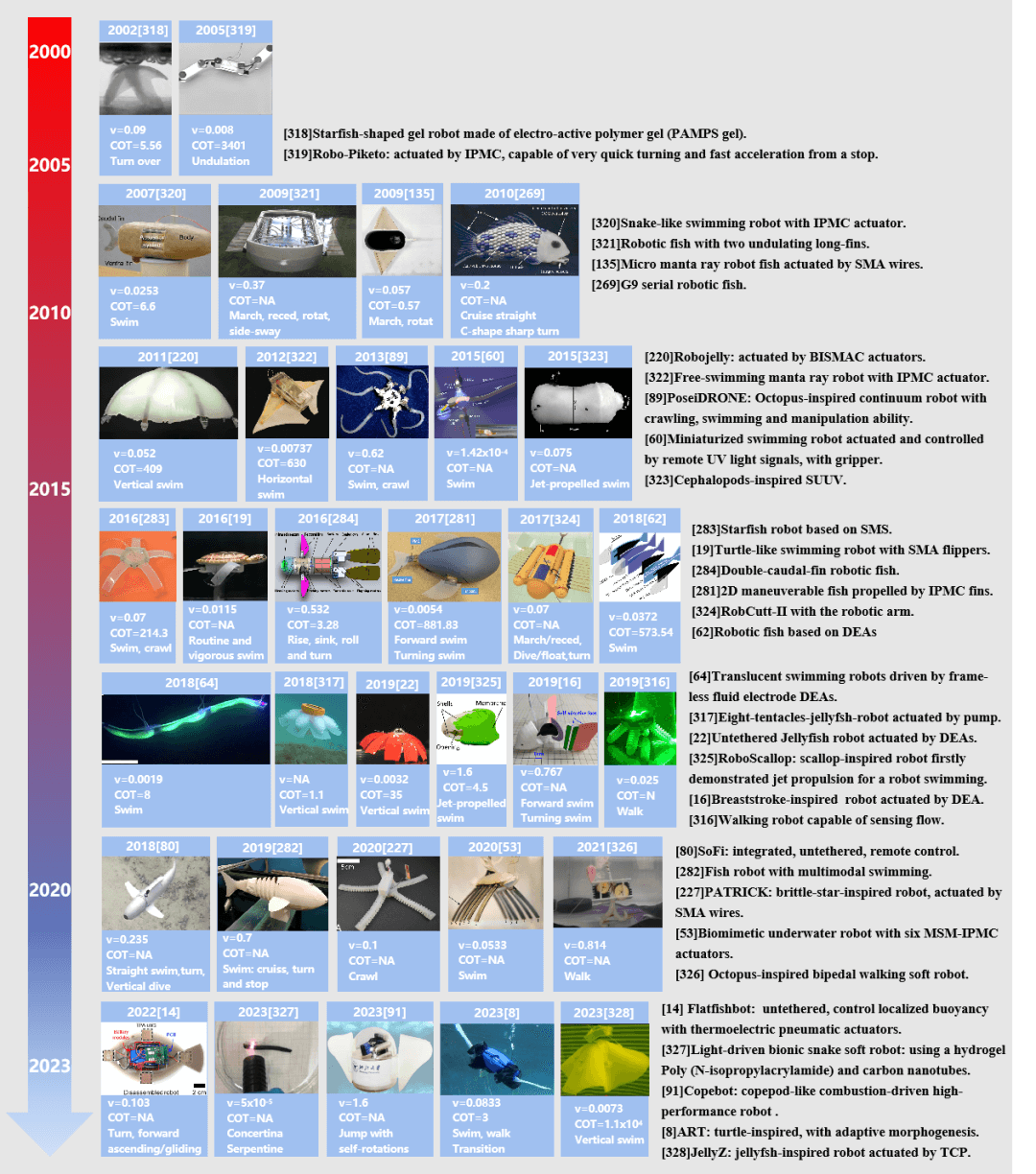 图3 具有代表性的仿生水下软体机器人(v的单位为m/s,COT的单位为J/Nm。当任何质量、速度或能量都是未知的时,就无法计算出COT。图中还展示了每个机器人能够实现的运动模式。)
图3 具有代表性的仿生水下软体机器人(v的单位为m/s,COT的单位为J/Nm。当任何质量、速度或能量都是未知的时,就无法计算出COT。图中还展示了每个机器人能够实现的运动模式。)
- 近十年来,水下软体机器人得到了发展,并面临着不同的挑战,本文将首先按时间顺序回顾部分重要成果。2012年至2017年,水下软机器人技术得到了快速发展,相关技术成果层出不穷(图4),并发明了一系列软材料、驱动器、传感器和制造技术。
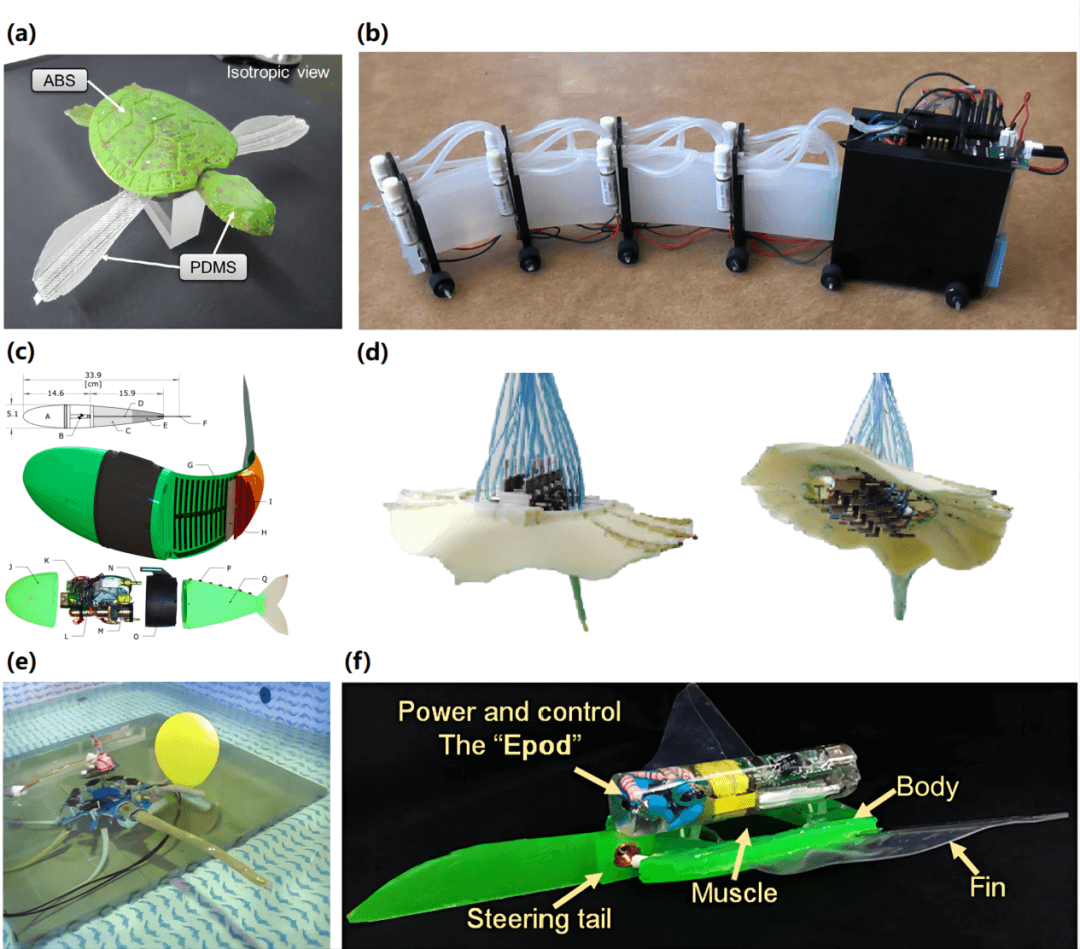 图4 2012-2017年在软材料、驱动器、传感器和制造技术方面的代表性水下软体机器人
图4 2012-2017年在软材料、驱动器、传感器和制造技术方面的代表性水下软体机器人
- 直到2017年,软材料、驱动器、传感器和控制算法的技术基础已经发展到一个更高的阶段。因此,研究人员不再局限于开发仅仅模仿自然界中生物的单一运动的软体机器人,而是试图开发能够实现不同运动模式的机器人系统。此外,他们还试图开发出适合深海等场景的能够自主运动的软体机器人。同时,与机器视觉、机器学习、CFD和FEM等多学科知识相结合,完成了机器人系统的建模和设计,并且实现了更长时间的自主运行(图5)。
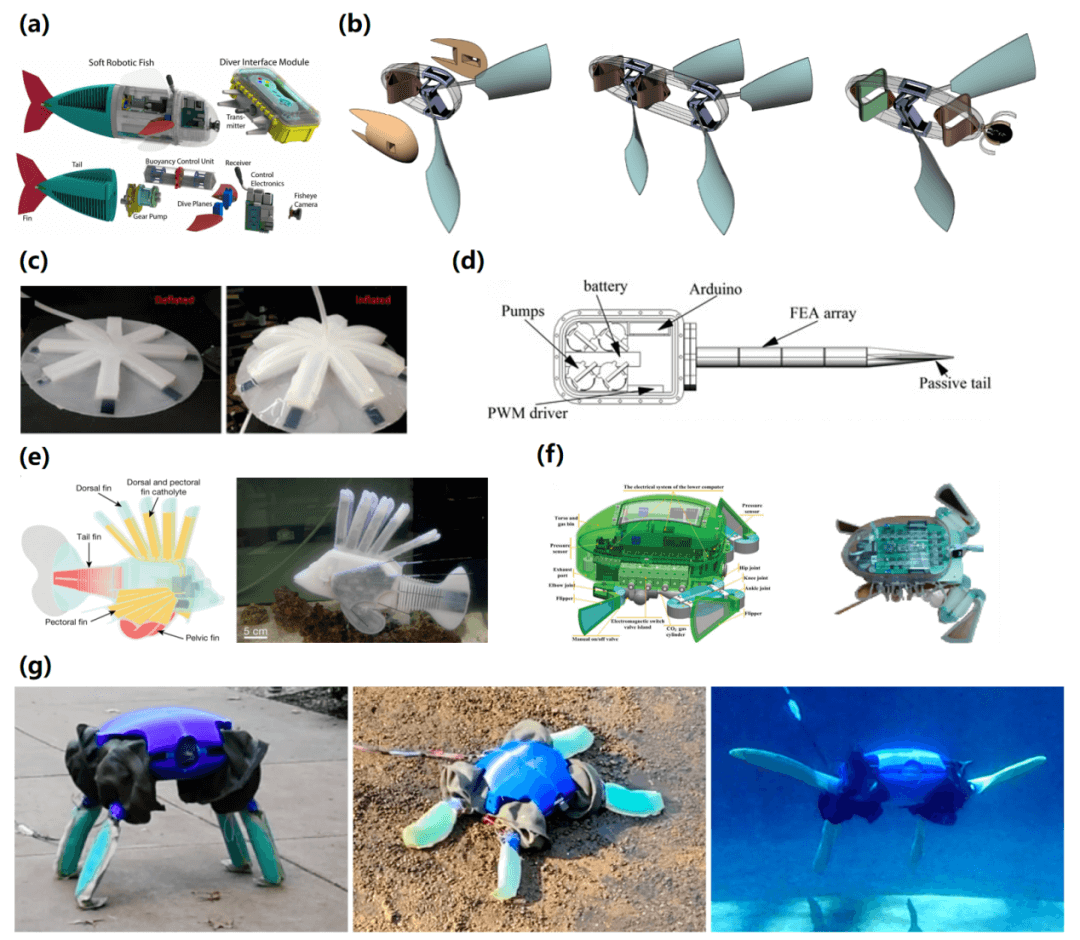 图5 2017-2022年在多运动模态、长续航自动力系统及其他先进技术方面的代表性水下软体机器人
图5 2017-2022年在多运动模态、长续航自动力系统及其他先进技术方面的代表性水下软体机器人
- 文章作者全面的调研了目前国内外学者在水下软体机器人技术领域的研究进展,回顾以往的研究,作者提出了以下4点仍需克服的挑战:
- 材料:研发新型活性软材料,具有不同力学性能,使水下软体机器人在不同方向和水下压力下具有突破性的性能,如耐压、耐寒和非线性运动。
- 结构:开发智能变刚度材料,与刚性结构相结合,实现水下刚柔耦合机器人,提高机器人的负载能力和刚度,克服低负载、刚性差和强度低的问题。
- 控制:研究仿生智能控制算法,用有限维模型描述无限维分布式参数模型,建立基于优化方法的等效控制模型,实现精确的实时控制,包括形态和位置的控制。
- 驱动、感知和控制一体化:利用嵌入式柔性传感器、柔性电子技术和3D打印技术,实现软体机器人的驱动感知控制一体化,提高机器人的智能控制和感知能力,但仍面临挑战。
- 此外,作者提出了以下9个比较具有前景的未来研究方向:
- 智能软材料的研究尚需提升,水下软体机器人应用有待进一步探索。
- 设计水陆两栖软体机器人,提高适应性和适用性。
- 优化机器人外形和驱动器设计,减少水下流体阻力。
- 发展深海资源勘探和开发技术,克服深海环境问题。
- 开发高效的控制算法,降低能量损耗,提高运动效率。
- 模仿集群行为,实现自组织群体协作。
- 优化机器人运动能力,适应水下复杂动态环境。
- 简化中微子通信技术,推广应用。
- 集成传感器,提供传感反馈,实现闭环控制。
论文信息:
Juntian Qu*, Yining Xu, Zhenkun Li, Zhenping Yu, Baijin Mao, Yunfei Wang, Ziqiang Wang, Qigao Fan, Xiang Qian, Min Zhang, Minyi Xu, Bin Liang, Houde Liu1, Xueqian Wang, Xiaohao Wang, Tiefeng Li*,Recent Advances on Underwater Soft Robots, Advanced Intelligent Systems
转载链接: