研究背景
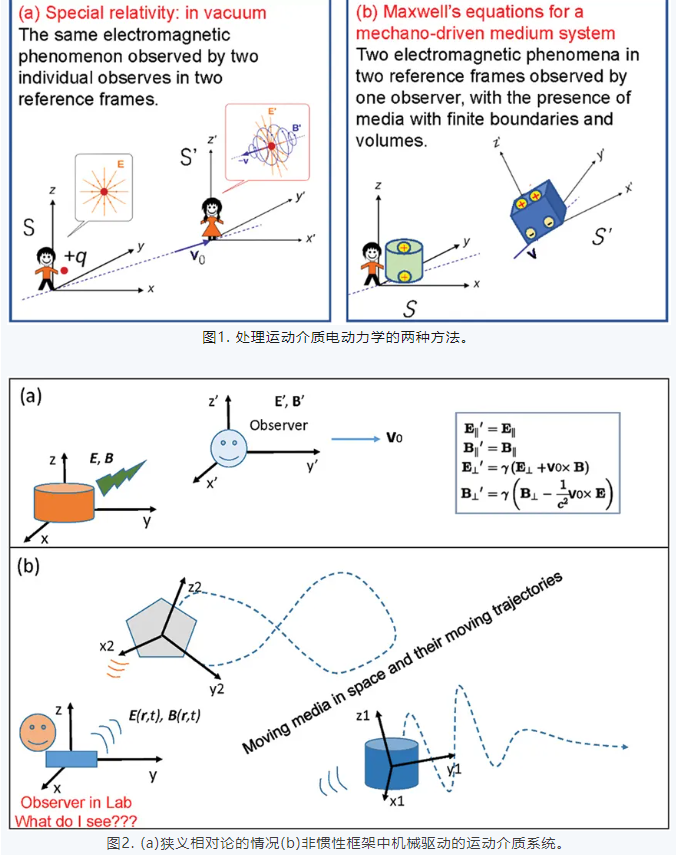
- 运动介质的电动力学一直以来备受研究者们关注。对于沿直线匀速运动的一般介质,使用标准微分形式麦克斯韦方程组(MEs)和近似闵可夫斯基本构方程来描述其电磁行为就足够了。通过使用洛伦兹变换保持MEs的协方差,可以从非运动观测者的参照系(S)中得到运动坐标系(S’)中观测到的电磁场。这是经典电动力学中公认的标准狭义相对论。由于洛伦兹变换中的一个重要参数是光速,通常是指光在真空中的速度,因此,狭义相对论是两个独立的观测者在两个惯性参照系中观测到的相同的电磁现象,这两个参照系以恒定的速度相对运动,而整个空间要么是真空,要么充满一种无边界的各向同性介质。
- 为了计算运动介质的电磁场,材料的本构关系是必须的。这些本构关系可以作为求解麦克斯韦方程组的补充条件。闵可夫斯基的观点是建立在一个假设的基础上的,即介质的性质和在其他惯性系中相应的本构方程保持不变。这有两个要求:沿直线匀速运动或在惯性参照系中运动,并预先确定相应的本构方程。然而,如果介质以加速度沿着复杂的轨迹运动(图1b),并且对于形状可变形的材料或液体,速度可能是时间和位置的函数,那么在这种情况下,从数学上不可能描述运动介质的电磁场。更重要的是,实际介质/材料可能是各向异性的,其介电常数强烈依赖于频率甚至晶体取向,因此,应考虑介质色散关系。而这种情况在实际材料的工程应用中经常发生。
文章概述
- 在经典电动力学中,运动总是指两个观察者在惯性参考系中的相对运动,因此在洛伦兹变换下,麦克斯韦方程的协方差可以在两个空间中分别保持。因此,电磁系统的能量是守恒的。而且由于真空中光速不变,描述真空空间中带电粒子电磁行为的理论可以用狭义相对论很好地描述。然而,在工程应用中,介质具有形状和大小,也可能在加速运动,并且一个系统可能具有多个运动物体,这些物体在外部机械触发下可能相关或独立。因此本文提出了描述此类电磁-机械系统中电磁现象的理论。我们主要介绍低速近似(v << c)下的动生麦克斯韦方程(MEs-f-MDMS)。
- 我们得出结论如下:
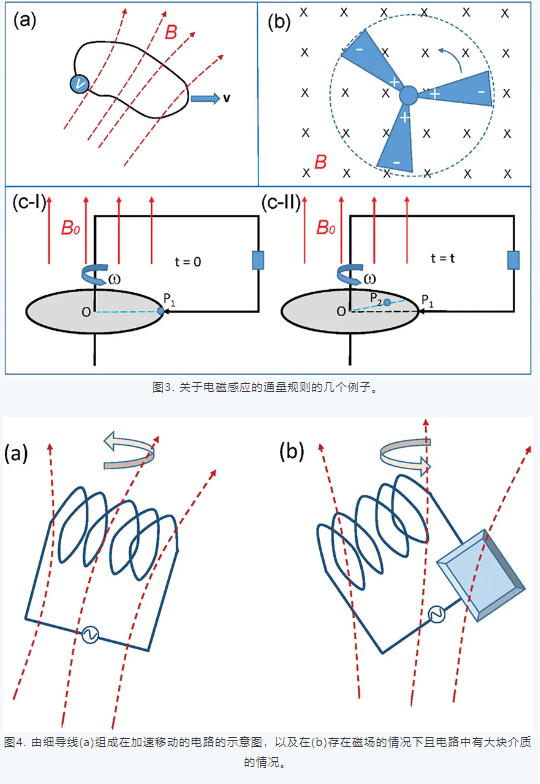
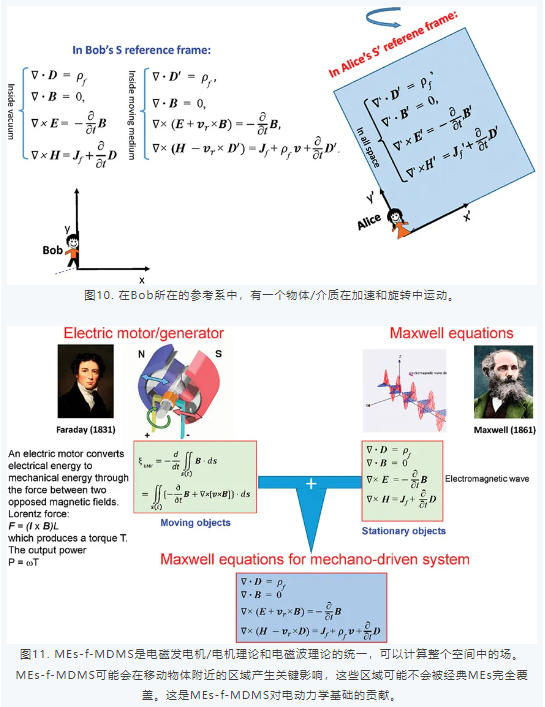
- MEs-f-MDMS 是描述运动物体内部电动力学所必需的,该物体不仅以加速平移运动,而且具有旋转运动。经典麦克斯韦方程组描述的是介质无本身运动的电动力学,这两个区域的全解均满足边界条件,因此物体的旋转将影响其附近的电磁场。这里也给出了求解MEs-f-MDMS的理论方法。
- 本文由王中林院士亲自执笔,从伽利略空间与时间、伽利略电磁学、方程边界条件、与狭义相对论的关系、潜在应用等13小节进行了详细阐述。相关文章以“The Maxwell’s equations for a mechano-driven media system (MEs-f-MDMS)”为题发表在顶级期刊《Advances in Physics: X》上,将是理解这一理论进展的绝佳参考。
原文链接:
https://doi.org/10.1080/23746149.2024.2354767
图文导读
潜在应用
- 在此之前,MEs可以有效地计算固定介质的电磁行为,这涵盖了物理和工程应用中的大多数场景。加速运动物体产生的电磁辐射可以通过使用MEs-f-MDMS来计算,例如分布在发电机或风车周围的电磁辐射。在这种情况下,介质的旋转很可能在近场场中引入额外的分量。物体的运动就像一个产生电磁波的源,而电磁波在空间中的传播仍受经典麦克斯韦方程组的支配。
- 传统上,电磁波通常是由振荡电流通过开放的天线产生的。MEs-f-MDMS的一个重要应用是利用介质的相对旋转产生低频电磁波,如旋转模式TENG,使辐射波在水等介质中到达较远的距离。在这种情况下,人们可以通过一个比传统天线尺寸小得多的受限装置来产生低频信号。这可以用于水下通信。
- 在今天的技术中,物体的移动速度可以是声速的数倍。在这种情况下,物体的运动可以严重影响电磁波的相位。对于一架飞行速度为3km/s的喷气式飞机,在位于100 km的距离点上,电磁波到达飞机表面需要0.3 ms。考虑到信号处理记录所需的时间,经过的时间约为1-5毫秒,在此期间飞机将飞行3-15米的距离,这可能比喷气机的长度还要长。在这种情况下,如果在理论建模中不考虑射流的运动,传统雷达捕捉飞行射流位置的计算结果与实际情况相差甚远。如果将相位信息用于雷达探测,那么如果通信在GHz数量级,这样的距离将产生巨大的相移。我们期望MEs-f-MDMS在工程上有更多的应用。
原文链接: